 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoMet: Modeling Group Cohesion for Socially Compliant Robot Navigation in Crowded Scenes
Paper and Code
Aug 26, 2021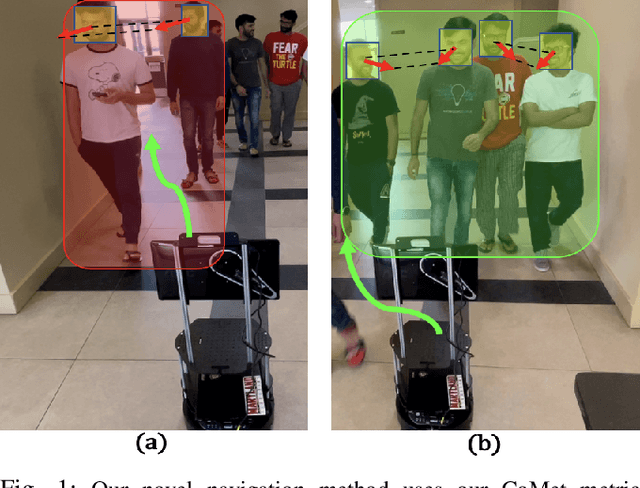
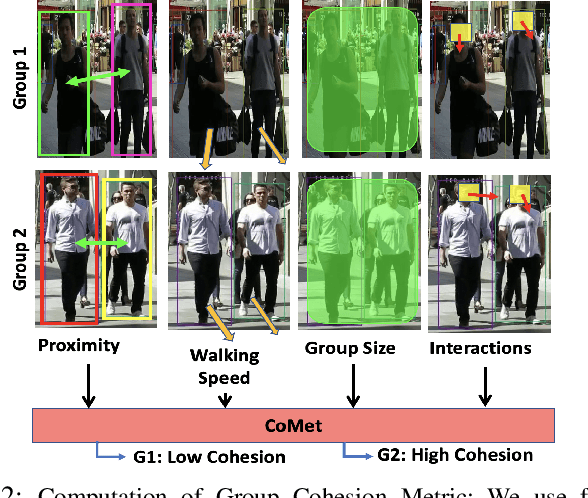
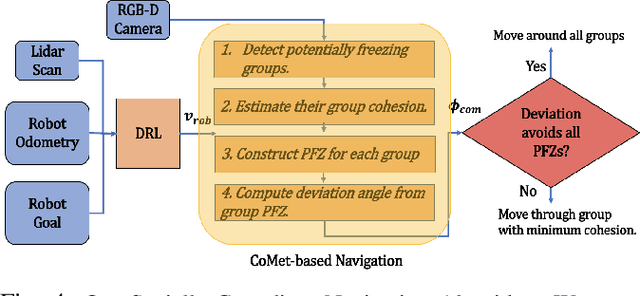
We present CoMet, a novel approach for computing a group's cohesion and using that to improve a robot's navigation in crowded scenes. Our approach uses a novel cohesion-metric that builds on prior work in social psychology. We compute this metric by utilizing various visual features of pedestrians from an RGB-D camera on-board a robot. Specifically, we detect characteristics corresponding to proximity between people, their relative walking speeds, the group size, and interactions between group members. We use our cohesion-metric to design and improve a navigation scheme that accounts for different levels of group cohesion while a robot moves through a crowd. We evaluate the precision and recall of our cohesion-metric based on perceptual evaluations. We highlight the performance of our social navigation algorithm on a Turtlebot robot and demonstrate its benefits in terms of multiple metrics: freezing rate (57% decrease), deviation (35.7% decrease), and path length of the trajectory(23.2% decrease).