 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Balance Control of Multi-arm Free-Floating Space Robots
Paper and Code
Jan 14, 2006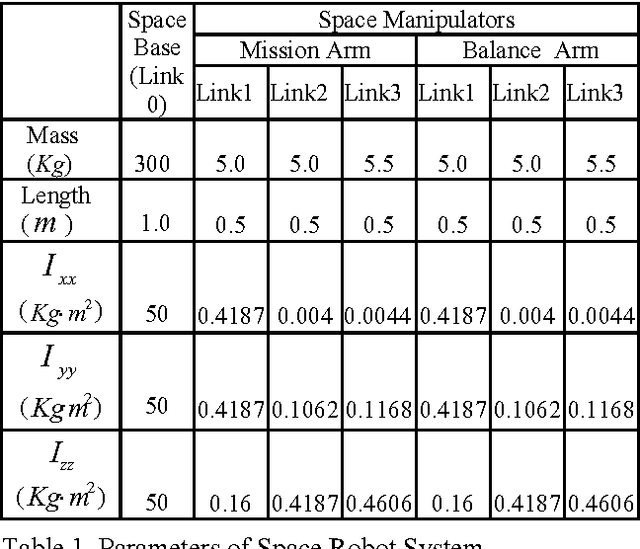
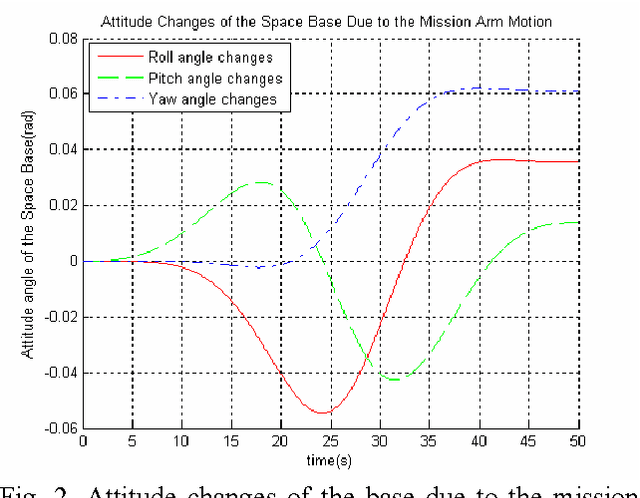
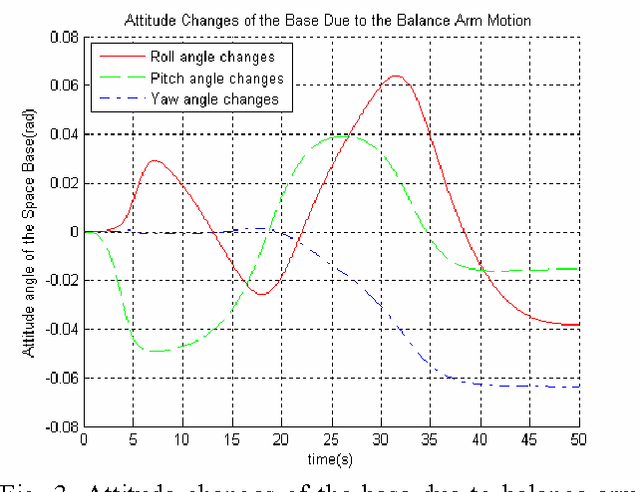
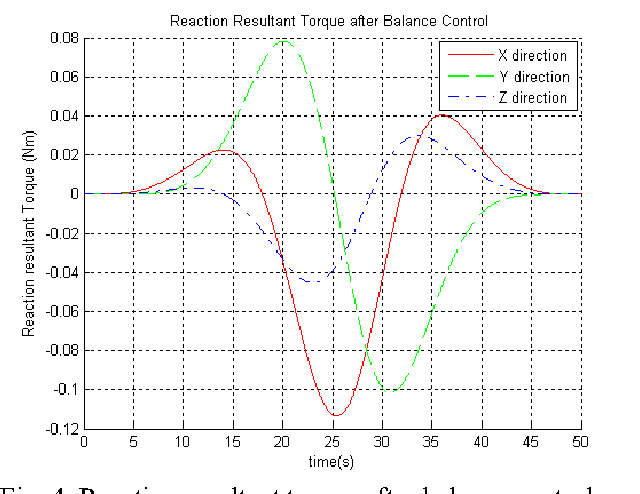
This paper investigates the problem of the dynamic balance control of multi-arm free-floating space robot during capturing an active object in close proximity. The position and orientation of space base will be affected during the operation of space manipulator because of the dynamics coupling between the manipulator and space base. This dynamics coupling is unique characteristics of space robot system. Such a disturbance will produce a serious impact between the manipulator hand and the object. To ensure reliable and precise operation, we propose to develop a space robot system consisting of two arms, with one arm (mission arm) for accomplishing the capture mission, and the other one (balance arm) compensating for the disturbance of the base. We present the coordinated control concept for balance of the attitude of the base using the balance arm. The mission arm can move along the given trajectory to approach and capture the target with no considering the disturbance from the coupling of the base. We establish a relationship between the motion of two arm that can realize the zeros reaction to the base. The simulation studies verified the validity and efficiency of the proposed control method.