 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSaving the Limping: Fault-tolerant Quadruped Locomotion via Reinforcement Learning
Paper and Code
Oct 02, 2022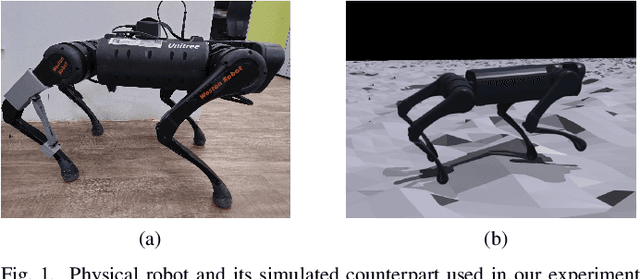
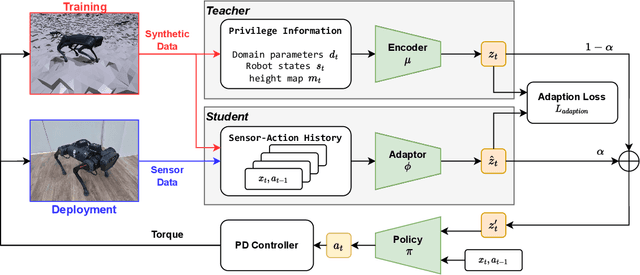
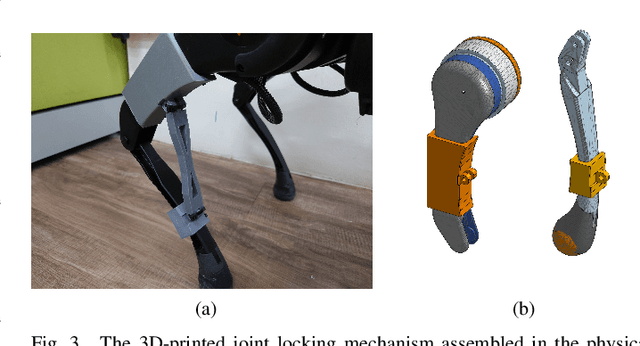
Quadruped locomotion now has acquired the skill to traverse or even sprint on uneven terrains in remote uncontrolled environment. However, surviving in the wild requires not only the maneuverability, but also the ability to handle unexpected hardware failures. We present the first deep reinforcement learning based methodology to train fault-tolerant controllers, which can bring an injured quadruped back home safely and speedily. We adopt the teacher-student framework to train the controller with close-to-reality joint-locking failure in the simulation, which can be zero-shot transferred to the physical robot without any fine-tuning. Extensive simulation and real-world experiments demonstrate that our fault-tolerant controller can efficiently lead a quadruped stably when it faces joint failure during locomotion.