 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeterogeneous-Agent Mirror Learning: A Continuum of Solutions to Cooperative MARL
Paper and Code
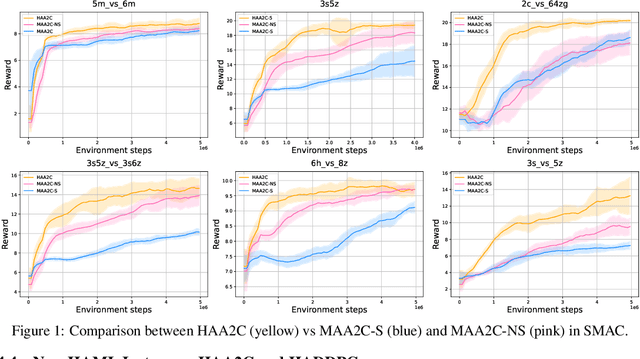
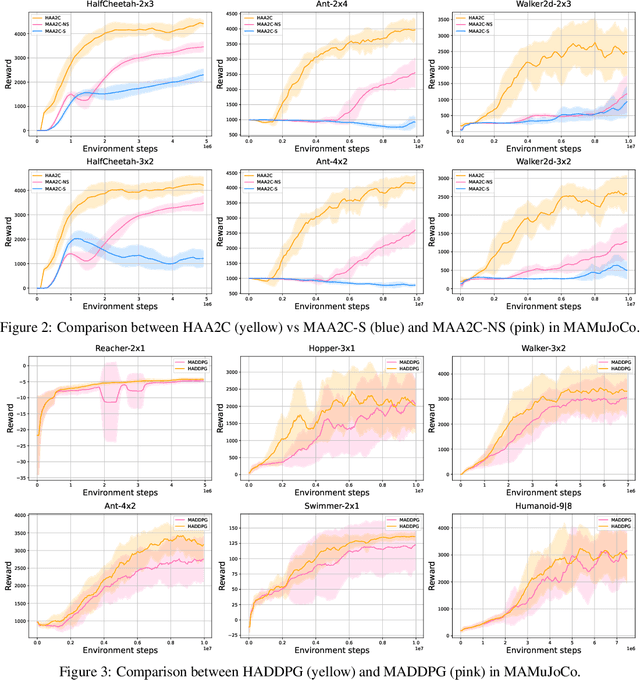
The necessity for cooperation among intelligent machines has popularised cooperative multi-agent reinforcement learning (MARL) in the artificial intelligence (AI) research community. However, many research endeavors have been focused on developing practical MARL algorithms whose effectiveness has been studied only empirically, thereby lacking theoretical guarantees. As recent studies have revealed, MARL methods often achieve performance that is unstable in terms of reward monotonicity or suboptimal at convergence. To resolve these issues, in this paper, we introduce a novel framework named Heterogeneous-Agent Mirror Learning (HAML) that provides a general template for MARL algorithmic designs. We prove that algorithms derived from the HAML template satisfy the desired properties of the monotonic improvement of the joint reward and the convergence to Nash equilibrium. We verify the practicality of HAML by proving that the current state-of-the-art cooperative MARL algorithms, HATRPO and HAPPO, are in fact HAML instances. Next, as a natural outcome of our theory, we propose HAML extensions of two well-known RL algorithms, HAA2C (for A2C) and HADDPG (for DDPG), and demonstrate their effectiveness against strong baselines on StarCraftII and Multi-Agent MuJoCo tasks.