 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTorque and velocity controllers to perform jumps with a humanoid robot: theory and implementation on the iCub robot
Paper and Code
Jul 05, 2022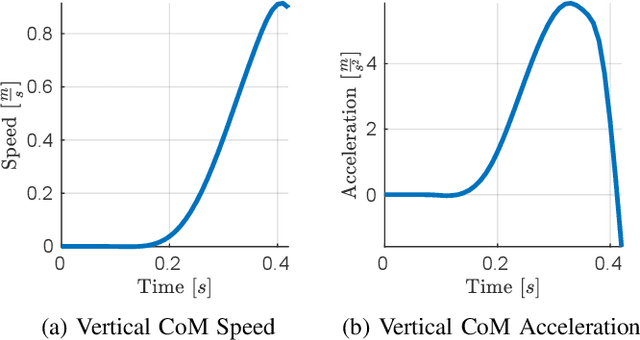
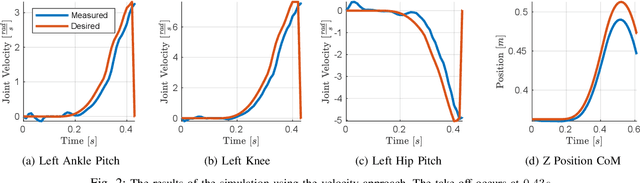
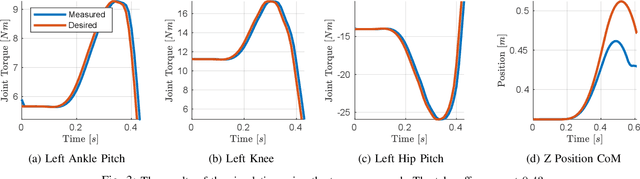
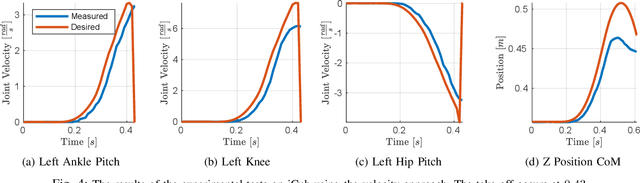
Jumping can be an effective way of locomotion to overcome small terrain gaps or obstacles. In this paper we propose two different approaches to perform jumps with a humanoid robot. Specifically, starting from a pre-defined CoM trajectory we develop the theory for a velocity controller and for a torque controller based on an optimization technique for the evaluation of the joints input. The controllers have been tested both in simulation and on the humanoid robot iCub. In simulation the robot was able to jump using both controllers, while the real system jumped with the velocity controller only. The results highlight the importance of controlling the centroidal angular momentum and they suggest that the joint performances, namely maximum power, of the legs and torso joints, and the low level control performances are fundamental to achieve acceptable results.