 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLidarMultiNet: Unifying LiDAR Semantic Segmentation, 3D Object Detection, and Panoptic Segmentation in a Single Multi-task Network
Paper and Code
Jun 24, 2022
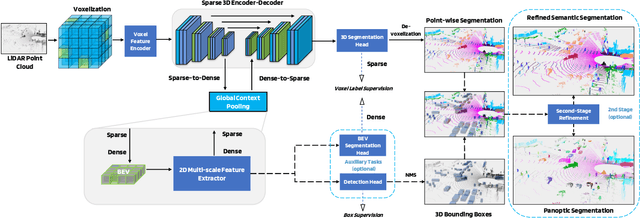
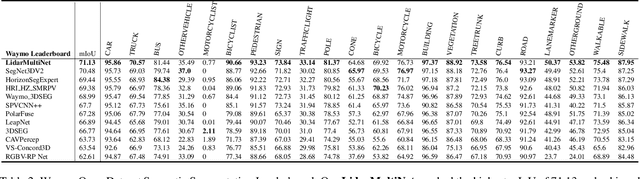
This technical report presents the 1st place winning solution for the Waymo Open Dataset 3D semantic segmentation challenge 2022. Our network, termed LidarMultiNet, unifies the major LiDAR perception tasks such as 3D semantic segmentation, object detection, and panoptic segmentation in a single framework. At the core of LidarMultiNet is a strong 3D voxel-based encoder-decoder network with a novel Global Context Pooling (GCP) module extracting global contextual features from a LiDAR frame to complement its local features. An optional second stage is proposed to refine the first-stage segmentation or generate accurate panoptic segmentation results. Our solution achieves a mIoU of 71.13 and is the best for most of the 22 classes on the Waymo 3D semantic segmentation test set, outperforming all the other 3D semantic segmentation methods on the official leaderboard. We demonstrate for the first time that major LiDAR perception tasks can be unified in a single strong network that can be trained end-to-end.