 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Planning for Contact-Rich Manipulation via Local Smoothing of Quasi-dynamic Contact Models
Paper and Code
Jun 22, 2022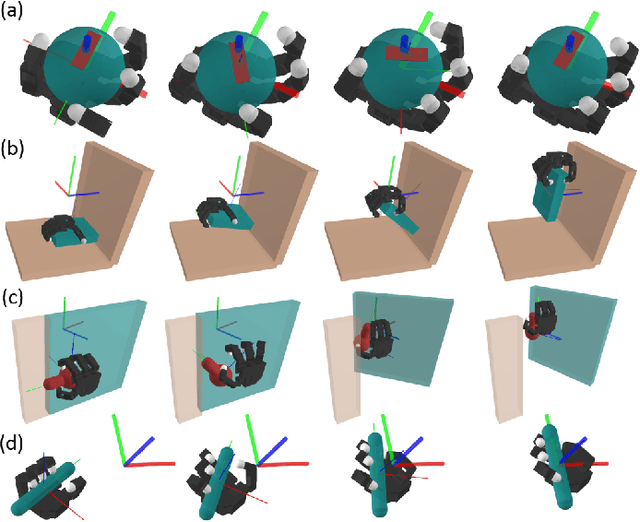

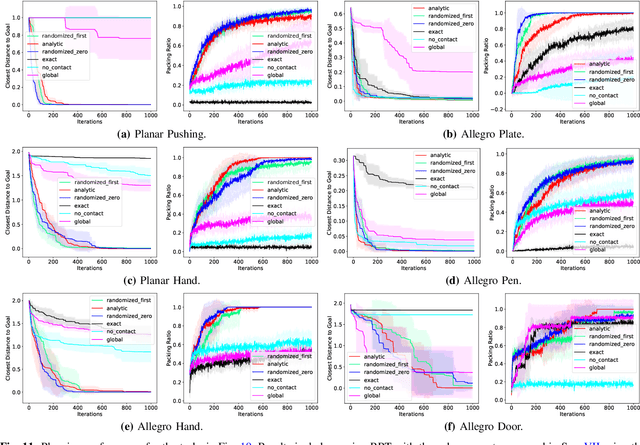
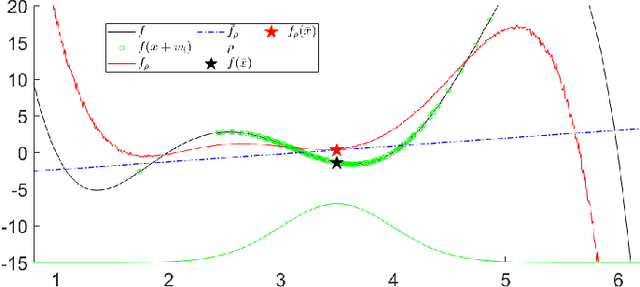
The empirical success of Reinforcement Learning (RL) in the setting of contact-rich manipulation leaves much to be understood from a model-based perspective, where the key difficulties are often attributed to (i) the explosion of contact modes, (ii) stiff, non-smooth contact dynamics and the resulting exploding / discontinuous gradients, and (iii) the non-convexity of the planning problem. The stochastic nature of RL addresses (i) and (ii) by effectively sampling and averaging the contact modes. On the other hand, model-based methods have tackled the same challenges by smoothing contact dynamics analytically. Our first contribution is to establish the theoretical equivalence of the two methods for simple systems, and provide qualitative and empirical equivalence on a number of complex examples. In order to further alleviate (ii), our second contribution is a convex, differentiable and quasi-dynamic formulation of contact dynamics, which is amenable to both smoothing schemes, and has proven through experiments to be highly effective for contact-rich planning. Our final contribution resolves (iii), where we show that classical sampling-based motion planning algorithms can be effective in global planning when contact modes are abstracted via smoothing. Applying our method on a collection of challenging contact-rich manipulation tasks, we demonstrate that efficient model-based motion planning can achieve results comparable to RL with dramatically less computation. Video: https://youtu.be/12Ew4xC-VwA