 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReward Uncertainty for Exploration in Preference-based Reinforcement Learning
Paper and Code
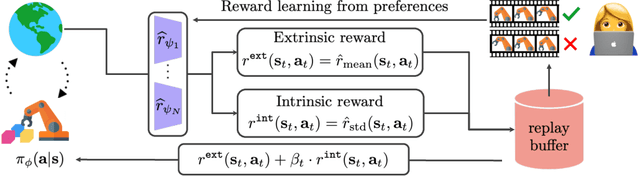


Conveying complex objectives to reinforcement learning (RL) agents often requires meticulous reward engineering. Preference-based RL methods are able to learn a more flexible reward model based on human preferences by actively incorporating human feedback, i.e. teacher's preferences between two clips of behaviors. However, poor feedback-efficiency still remains a problem in current preference-based RL algorithms, as tailored human feedback is very expensive. To handle this issue, previous methods have mainly focused on improving query selection and policy initialization. At the same time, recent exploration methods have proven to be a recipe for improving sample-efficiency in RL. We present an exploration method specifically for preference-based RL algorithms. Our main idea is to design an intrinsic reward by measuring the novelty based on learned reward. Specifically, we utilize disagreement across ensemble of learned reward models. Our intuition is that disagreement in learned reward model reflects uncertainty in tailored human feedback and could be useful for exploration. Our experiments show that exploration bonus from uncertainty in learned reward improves both feedback- and sample-efficiency of preference-based RL algorithms on complex robot manipulation tasks from MetaWorld benchmarks, compared with other existing exploration methods that measure the novelty of state visitation.