 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-sensor Suboptimal Fusion Student's $t$ Filter
Paper and Code
Apr 23, 2022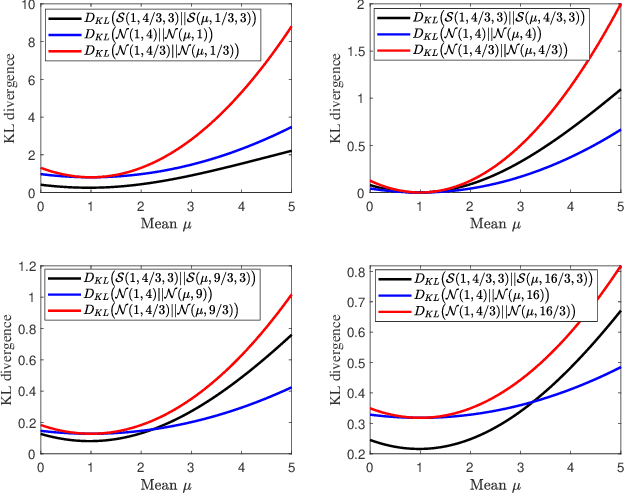
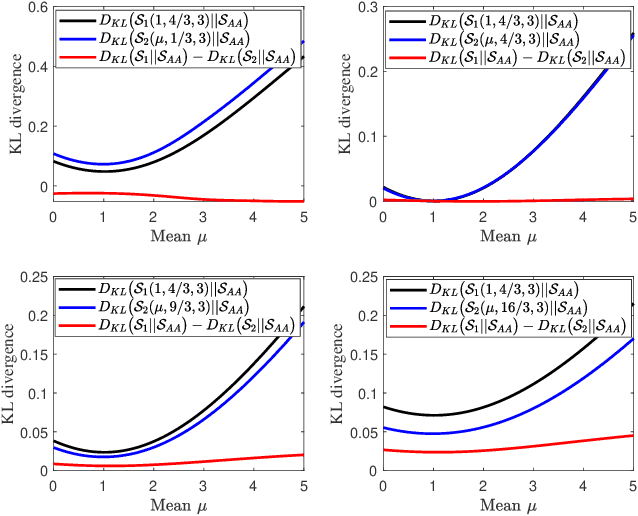
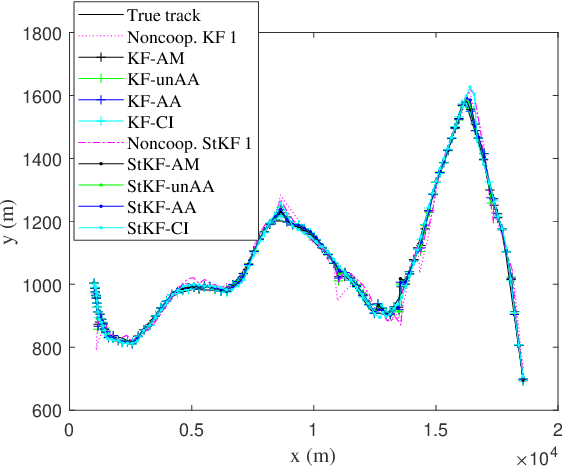

A multi-sensor fusion Student's $t$ filter is proposed for time-series recursive estimation in the presence of heavy-tailed process and measurement noises. Driven from an information-theoretic optimization, the approach extends the single sensor Student's $t$ Kalman filter based on the suboptimal arithmetic average (AA) fusion approach. To ensure computationally efficient, closed-form $t$ density recursion, reasonable approximation has been used in both local-sensor filtering and inter-sensor fusion calculation. The overall framework accommodates any Gaussian-oriented fusion approach such as the covariance intersection (CI). Simulation demonstrates the effectiveness of the proposed multi-sensor AA fusion-based $t$ filter in dealing with outliers as compared with the classic Gaussian estimator, and the advantage of the AA fusion in comparison with the CI approach and the augmented measurement fusion.