 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKC-TSS: An Algorithm for Heterogeneous Robot Teams Performing Resilient Target Search
Paper and Code
Mar 02, 2022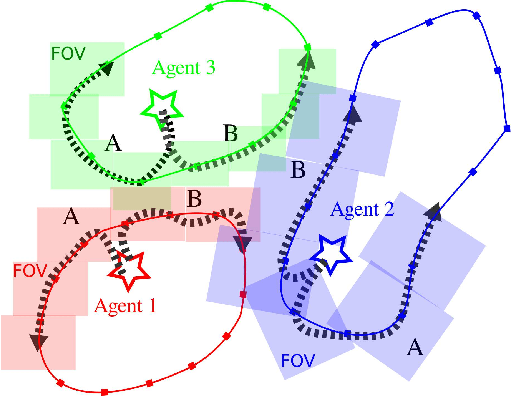
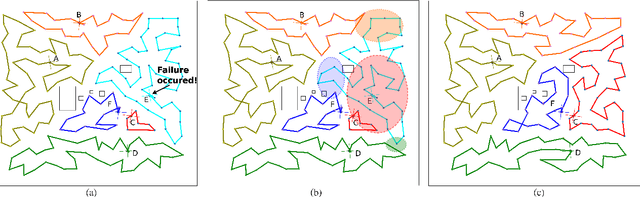
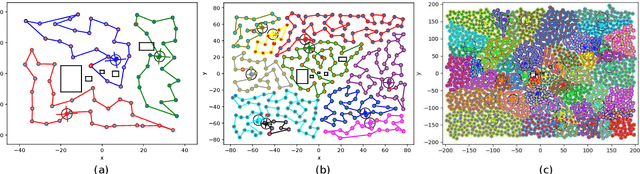
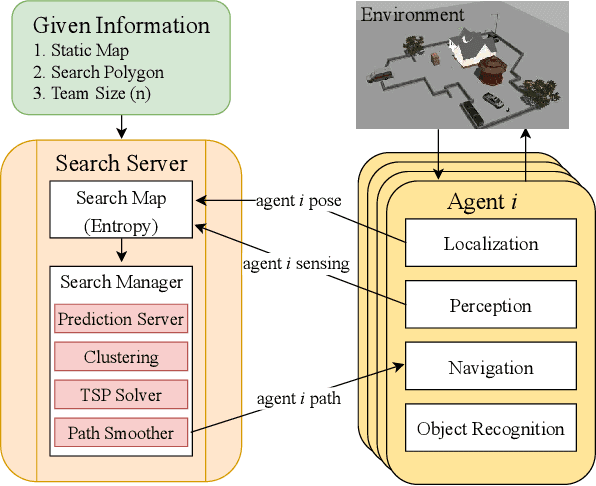
This paper proposes KC-TSS: K-Clustered-Traveling Salesman Based Search, a failure resilient path planning algorithm for heterogeneous robot teams performing target search in human environments. We separate the sample path generation problem into Heterogeneous Clustering and multiple Traveling Salesman Problems. This allows us to provide high-quality candidate paths (i.e. minimal backtracking, overlap) to an Information-Theoretic utility function for each agent. First, we generate waypoint candidates from map knowledge and a target prediction model. All of these candidates are clustered according to the number of agents and their ability to cover space, or coverage competency. Each agent solves a Traveling Salesman Problem (TSP) instance over their assigned cluster and then candidates are fed to a utility function for path selection. We perform extensive Gazebo simulations and preliminary deployment of real robots in indoor search and simulated rescue scenarios with static targets. We compare our proposed method against a state-of-the-art algorithm and show that ours is able to outperform it in mission time. Our method provides resilience in the event of single or multi teammate failure by recomputing global team plans online.