 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLF-VIO: A Visual-Inertial-Odometry Framework for Large Field-of-View Cameras with Negative Plane
Paper and Code
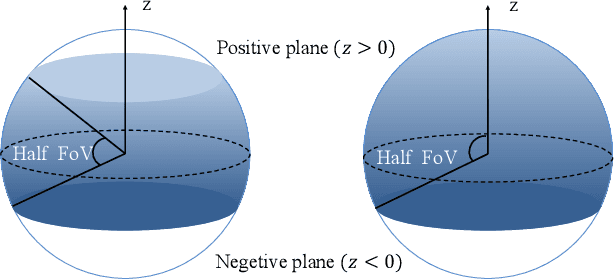
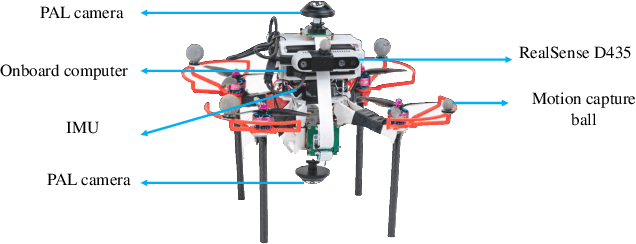
Visual-inertial-odometry has attracted extensive attention in the field of autonomous driving and robotics. The size of Field of View (FoV) plays an important role in Visual-Odometry (VO) and Visual-Inertial-Odometry (VIO), as a large FoV enables to perceive a wide range of surrounding scene elements and features. However, when the field of the camera reaches the negative half plane, one cannot simply use [u,v,1]^T to represent the image feature points anymore. To tackle this issue, we propose LF-VIO, a real-time VIO framework for cameras with extremely large FoV. We leverage a three-dimensional vector with unit length to represent feature points, and design a series of algorithms to overcome this challenge. To address the scarcity of panoramic visual odometry datasets with ground-truth location and pose, we present the PALVIO dataset, collected with a Panoramic Annular Lens (PAL) system with an entire FoV of 360x(40-120) degrees and an IMU sensor. With a comprehensive variety of experiments, the proposed LF-VIO is verified on both the established PALVIO benchmark and a public fisheye camera dataset with a FoV of 360x(0-93.5) degrees. LF-VIO outperforms state-of-the-art visual-inertial-odometry methods. Our dataset and code are made publicly available at https://github.com/flysoaryun/LF-VIO