 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Transformer Meets Robotic Grasping: Exploits Context for Efficient Grasp Detection
Paper and Code
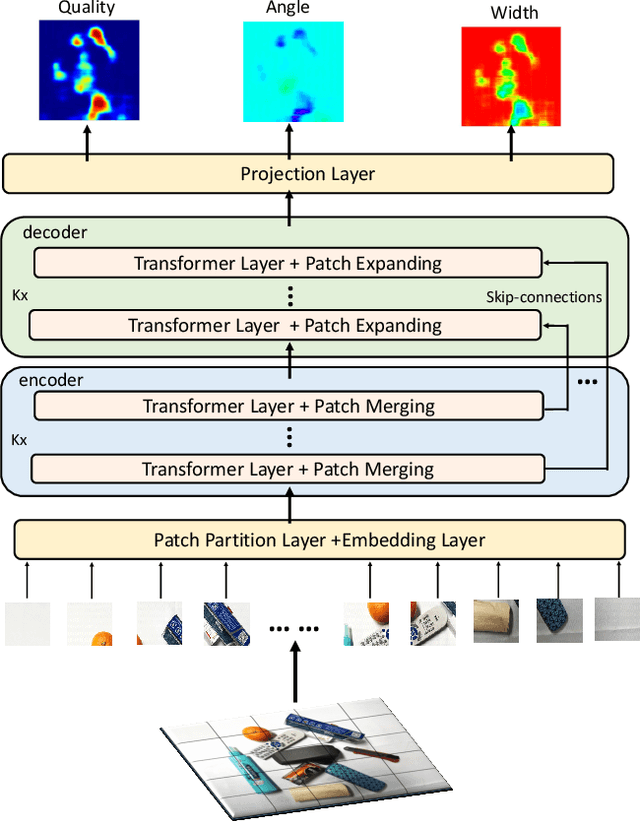
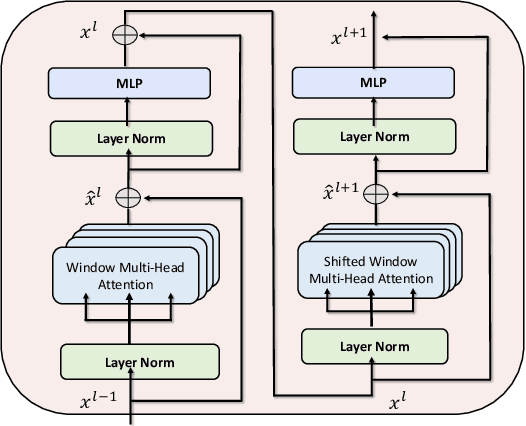
In this paper, we present a transformer-based architecture, namely TF-Grasp, for robotic grasp detection. The developed TF-Grasp framework has two elaborate designs making it well suitable for visual grasping tasks. The first key design is that we adopt the local window attention to capture local contextual information and detailed features of graspable objects. Then, we apply the cross window attention to model the long-term dependencies between distant pixels. Object knowledge, environmental configuration, and relationships between different visual entities are aggregated for subsequent grasp detection. The second key design is that we build a hierarchical encoder-decoder architecture with skip-connections, delivering shallow features from encoder to decoder to enable a multi-scale feature fusion. Due to the powerful attention mechanism, the TF-Grasp can simultaneously obtain the local information (i.e., the contours of objects), and model long-term connections such as the relationships between distinct visual concepts in clutter. Extensive computational experiments demonstrate that the TF-Grasp achieves superior results versus state-of-art grasping convolutional models and attain a higher accuracy of 97.99% and 94.6% on Cornell and Jacquard grasping datasets, respectively. Real-world experiments using a 7DoF Franka Emika Panda robot also demonstrate its capability of grasping unseen objects in a variety of scenarios. The code and pre-trained models will be available at https://github.com/WangShaoSUN/grasp-transformer