 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransCG: A Large-Scale Real-World Dataset for Transparent Object Depth Completion and Grasping
Paper and Code
Feb 17, 2022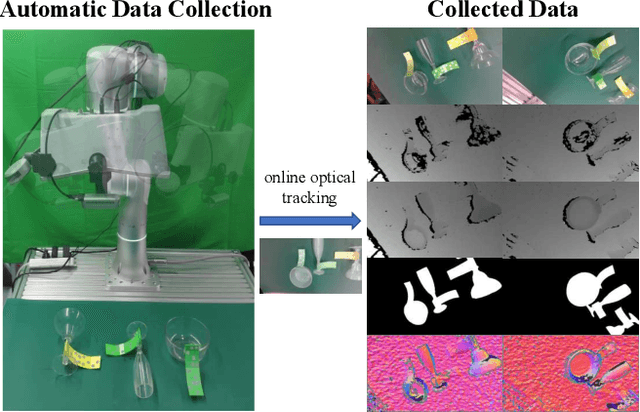
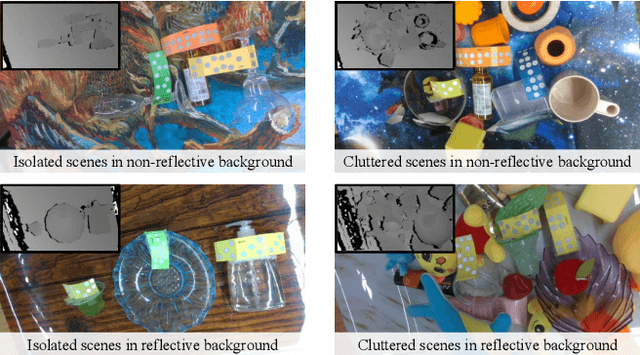
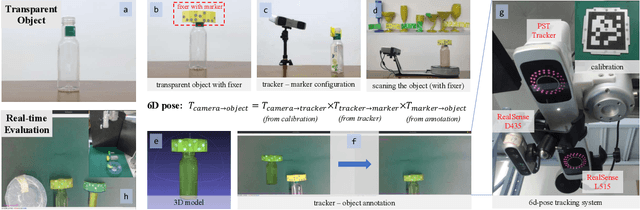
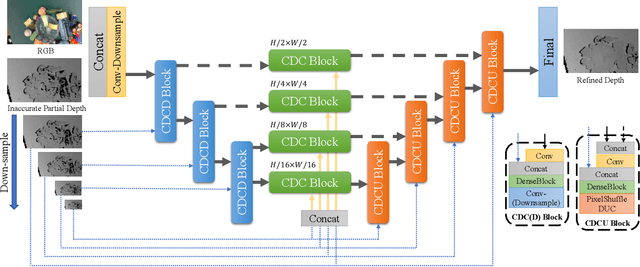
Transparent objects are common in our daily life and frequently handled in the automated production line. Robust vision-based robotic grasping and manipulation for these objects would be beneficial for automation. However, the majority of current grasping algorithms would fail in this case since they heavily rely on the depth image, while ordinary depth sensors usually fail to produce accurate depth information for transparent objects owing to the reflection and refraction of light. In this work, we address this issue by contributing a large-scale real-world dataset for transparent object depth completion, which contains 57,715 RGB-D images from 130 different scenes. Our dataset is the first large-scale real-world dataset and provides the most comprehensive annotation. Cross-domain experiments show that our dataset has a great generalization ability. Moreover, we propose an end-to-end depth completion network, which takes the RGB image and the inaccurate depth map as inputs and outputs a refined depth map. Experiments demonstrate superior efficacy, efficiency and robustness of our method over previous works, and it is able to process images of high resolutions under limited hardware resources. Real robot experiment shows that our method can also be applied to novel object grasping robustly. The full dataset and our method are publicly available at www.graspnet.net/transcg.