 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Ground Objects for Robot Task and Motion Planning
Paper and Code
Feb 15, 2022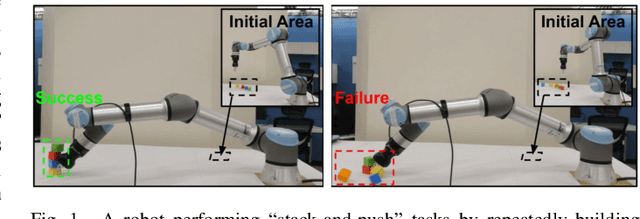
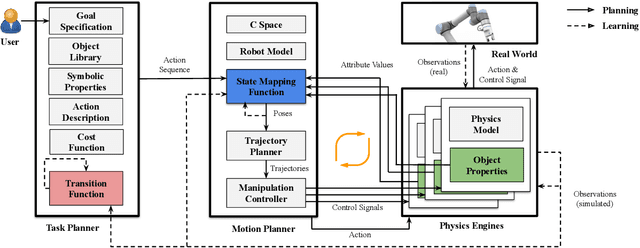
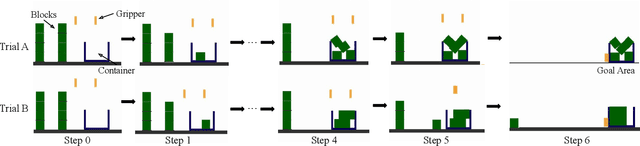
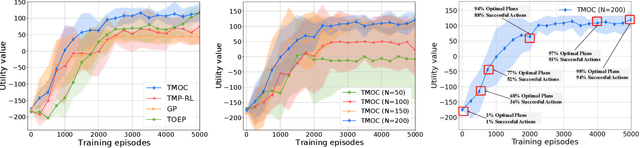
Task and motion planning (TAMP) algorithms have been developed to help robots plan behaviors in discrete and continuous spaces. Robots face complex real-world scenarios, where it is hardly possible to model all objects or their physical properties for robot planning (e.g., in kitchens or shopping centers). In this paper, we define a new object-centric TAMP problem, where the TAMP robot does not know object properties (e.g., size and weight of blocks). We then introduce Task-Motion Object-Centric planning ({\bf TMOC}), a grounded TAMP algorithm that learns to ground objects and their physical properties with a physics engine. TMOC is particularly useful for those tasks that involve dynamic complex robot-multi-object interactions that can hardly be modeled beforehand. We have demonstrated and evaluated TMOC in simulation and using a real robot. Results show that TMOC outperforms competitive baselines from the literature in cumulative utility.