 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Task-Parameterized Skills from Few Demonstrations
Paper and Code
Jan 24, 2022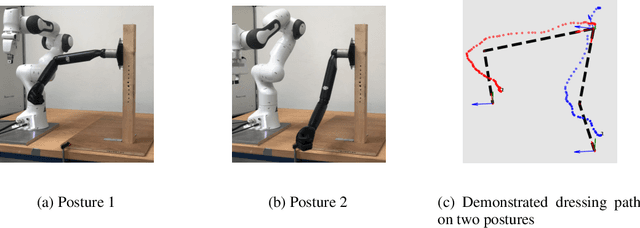


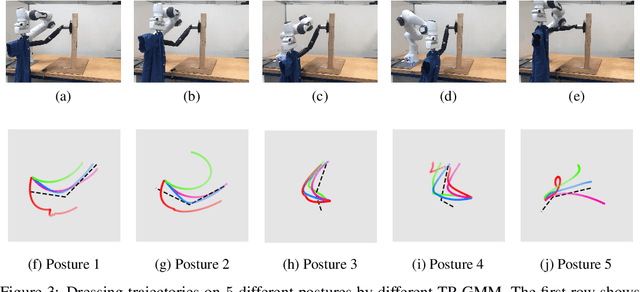
Moving away from repetitive tasks, robots nowadays demand versatile skills that adapt to different situations. Task-parameterized learning improves the generalization of motion policies by encoding relevant contextual information in the task parameters, hence enabling flexible task executions. However, training such a policy often requires collecting multiple demonstrations in different situations. To comprehensively create different situations is non-trivial thus renders the method less applicable to real-world problems. Therefore, training with fewer demonstrations/situations is desirable. This paper presents a novel concept to augment the original training dataset with synthetic data for policy improvements, thus allows learning task-parameterized skills with few demonstrations.