 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnvironmental force sensing enables robots to traverse cluttered obstacles with interaction
Paper and Code
Dec 15, 2021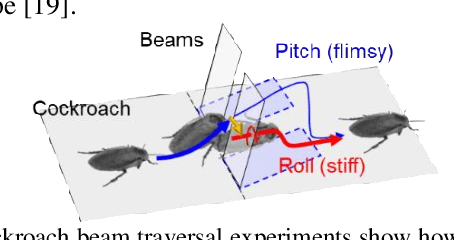
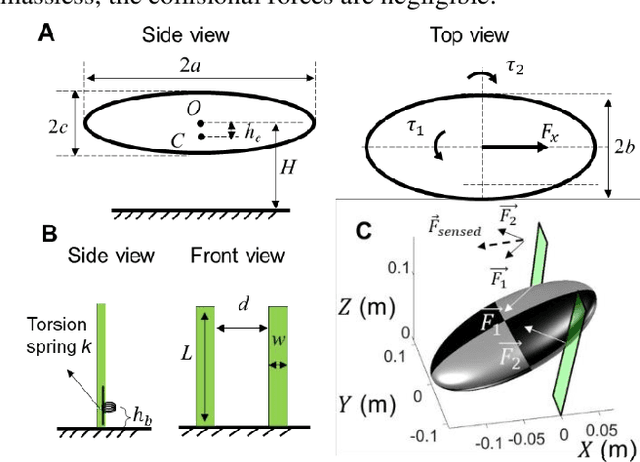
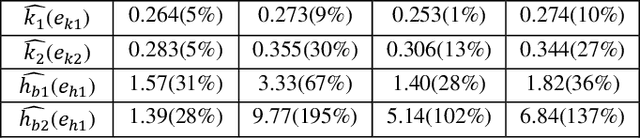
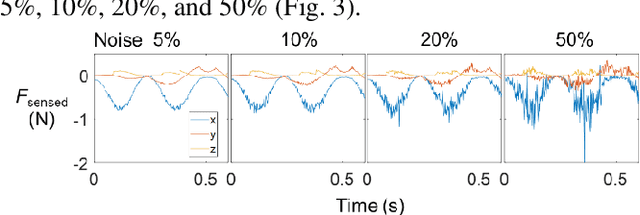
Many applications require robots to move through terrain with large obstacles, such as self-driving, search and rescue, and extraterrestrial exploration. Although robots are already excellent at avoiding sparse obstacles, they still struggle in traversing cluttered obstacles. Inspired by cockroaches that use and respond to physical interaction with obstacles in various ways to traverse grass-like beams with different stiffness, here we developed a physics model of a minimalistic robot capable of environmental force sensing propelled forward to traverse two beams to simulate and understand the traversal of cluttered obstacles. Beam properties like stiffness and deflection locations could be estimated from the noisy beam contact forces measured, whose fidelity increased with sensing time. Using these estimates, the model predicted the cost of traversal defined using potential energy barriers and used it to plan and control the robot to generate and track a trajectory to traverse with minimal cost. When encountering stiff beams, the simulation robot transitioned from a more costly pitch mode to a less costly roll mode to traverse. When encountering flimsy beams, it chose to push cross beams with less energy cost than avoiding beams. Finally, we developed a physical robot and demonstrated the usefulness of the estimation method.