 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnvironmental force sensing enables robots to traverse cluttered obstacles with interaction
Dec 15, 2021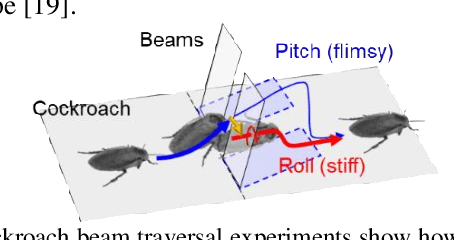
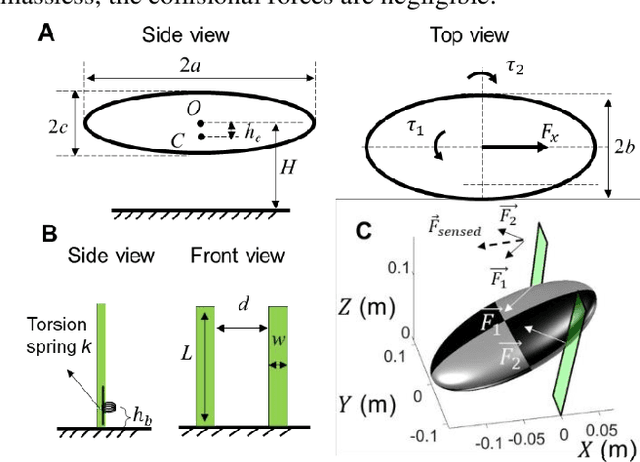
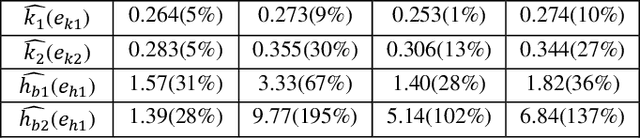
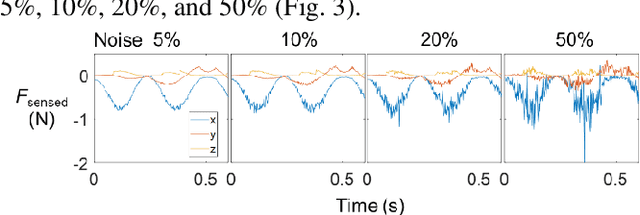
Many applications require robots to move through terrain with large obstacles, such as self-driving, search and rescue, and extraterrestrial exploration. Although robots are already excellent at avoiding sparse obstacles, they still struggle in traversing cluttered obstacles. Inspired by cockroaches that use and respond to physical interaction with obstacles in various ways to traverse grass-like beams with different stiffness, here we developed a physics model of a minimalistic robot capable of environmental force sensing propelled forward to traverse two beams to simulate and understand the traversal of cluttered obstacles. Beam properties like stiffness and deflection locations could be estimated from the noisy beam contact forces measured, whose fidelity increased with sensing time. Using these estimates, the model predicted the cost of traversal defined using potential energy barriers and used it to plan and control the robot to generate and track a trajectory to traverse with minimal cost. When encountering stiff beams, the simulation robot transitioned from a more costly pitch mode to a less costly roll mode to traverse. When encountering flimsy beams, it chose to push cross beams with less energy cost than avoiding beams. Finally, we developed a physical robot and demonstrated the usefulness of the estimation method.
A minimalistic stochastic dynamics model of cluttered obstacle traversal
Dec 15, 2021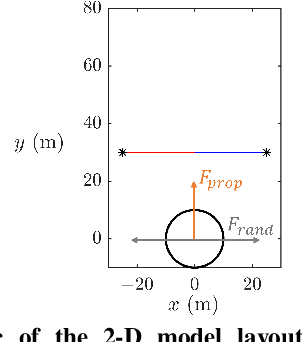
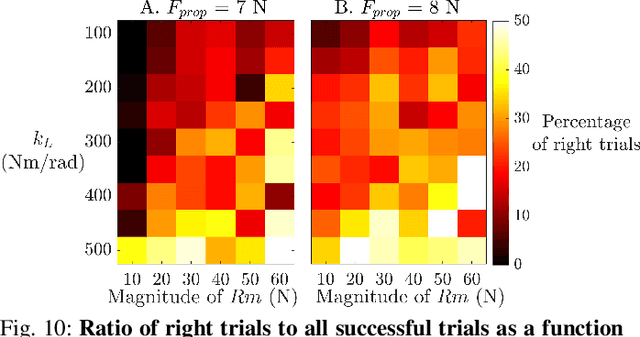
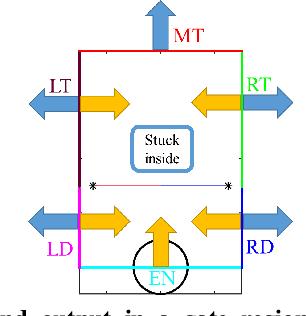
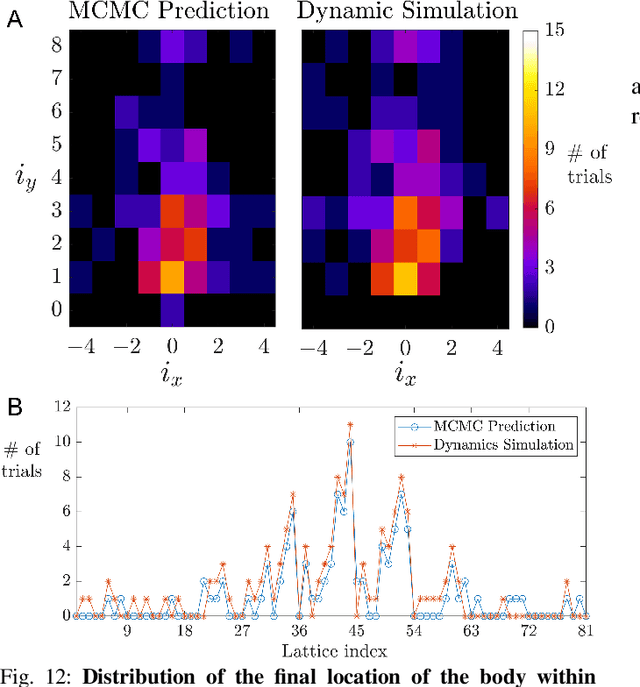
Robots are still poor at traversing cluttered large obstacles required for important applications like search and rescue. By contrast, animals are excellent at doing so, often using direct physical interaction with obstacles rather than avoiding them. Here, towards understanding the dynamics of cluttered obstacle traversal, we developed a minimalistic stochastic dynamics simulation inspired by our recent study of insects traversing grass-like beams. The 2-D model system consists of a forward self-propelled circular locomotor translating on a frictionless level plane with a lateral random force and interacting with two adjacent horizontal beams that form a gate. We found that traversal probability increases monotonically with propulsive force, but first increases then decreases with random force magnitude. For asymmetric beams with different stiffness, traversal is more likely towards the side of the less stiff beam. These observations are in accord with those expected from a potential energy landscape approach. Furthermore, we extended the single gate in a lattice configuration to form a large cluttered obstacle field. A Markov chain Monte Carlo method was applied to predict traversal in the large field, using the input-output probability map obtained from single gate simulations. This method achieved high accuracy in predicting the statistical distribution of the final location of the body within the obstacle field, while saving computation time by a factor of 10^5.