Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZUPT Aided GNSS Factor Graph with Inertial Navigation Integration for Wheeled Robots
Paper and Code
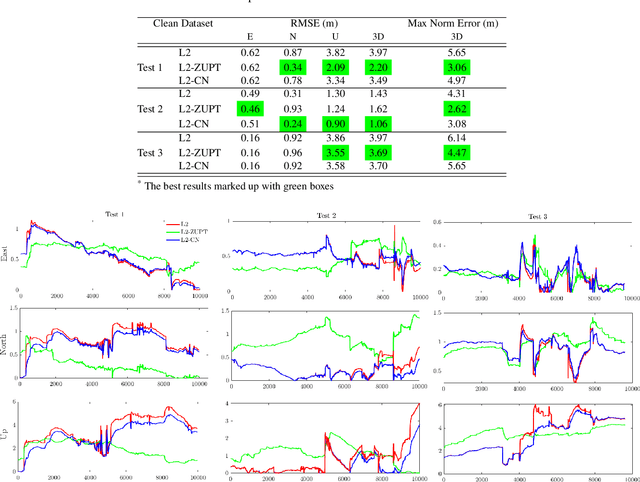

In this work, we demonstrate the importance of zero velocity information for global navigation satellite system (GNSS) based navigation. The effectiveness of using the zero velocity information with zero velocity update (ZUPT) for inertial navigation applications have been shown in the literature. Here we leverage this information and add it as a position constraint in a GNSS factor graph. We also compare its performance to a GNSS/inertial navigation system (INS) coupled factor graph. We tested our ZUPT aided factor graph method on three datasets and compared it with the GNSS-only factor graph.
* 9 pages, 8 figures, Preprint Version. Published in ION GNSS+ 2021
View paper on