 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePersonalized Federated Learning of Driver Prediction Models for Autonomous Driving
Paper and Code
Dec 02, 2021
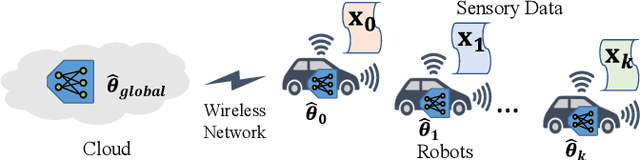

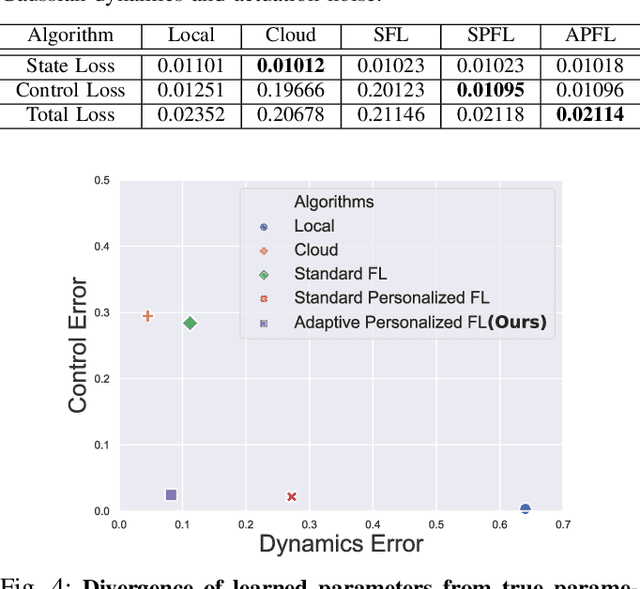
Autonomous vehicles (AVs) must interact with a diverse set of human drivers in heterogeneous geographic areas. Ideally, fleets of AVs should share trajectory data to continually re-train and improve trajectory forecasting models from collective experience using cloud-based distributed learning. At the same time, these robots should ideally avoid uploading raw driver interaction data in order to protect proprietary policies (when sharing insights with other companies) or protect driver privacy from insurance companies. Federated learning (FL) is a popular mechanism to learn models in cloud servers from diverse users without divulging private local data. However, FL is often not robust -- it learns sub-optimal models when user data comes from highly heterogeneous distributions, which is a key hallmark of human-robot interactions. In this paper, we present a novel variant of personalized FL to specialize robust robot learning models to diverse user distributions. Our algorithm outperforms standard FL benchmarks by up to 2x in real user studies that we conducted where human-operated vehicles must gracefully merge lanes with simulated AVs in the standard CARLA and CARLO AV simulators.