Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Global Convergence of Policy Optimization for Constrained MDPs
Paper and Code
Oct 31, 2021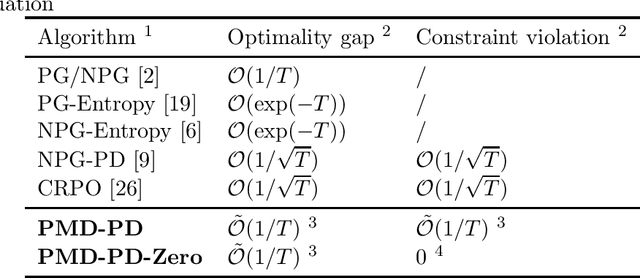
We address the issue of safety in reinforcement learning. We pose the problem in a discounted infinite-horizon constrained Markov decision process framework. Existing results have shown that gradient-based methods are able to achieve an $\mathcal{O}(1/\sqrt{T})$ global convergence rate both for the optimality gap and the constraint violation. We exhibit a natural policy gradient-based algorithm that has a faster convergence rate $\mathcal{O}(\log(T)/T)$ for both the optimality gap and the constraint violation. When Slater's condition is satisfied and known a priori, zero constraint violation can be further guaranteed for a sufficiently large $T$ while maintaining the same convergence rate.
View paper on