 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV-Learning -- A Simple, Efficient, Decentralized Algorithm for Multiagent RL
Paper and Code
Oct 27, 2021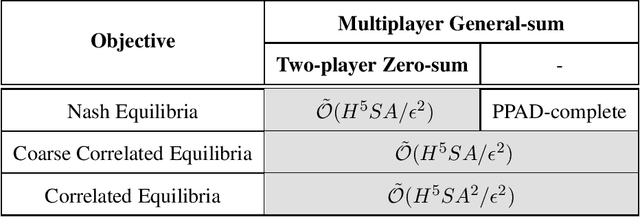
A major challenge of multiagent reinforcement learning (MARL) is the curse of multiagents, where the size of the joint action space scales exponentially with the number of agents. This remains to be a bottleneck for designing efficient MARL algorithms even in a basic scenario with finitely many states and actions. This paper resolves this challenge for the model of episodic Markov games. We design a new class of fully decentralized algorithms -- V-learning, which provably learns Nash equilibria (in the two-player zero-sum setting), correlated equilibria and coarse correlated equilibria (in the multiplayer general-sum setting) in a number of samples that only scales with $\max_{i\in[m]} A_i$, where $A_i$ is the number of actions for the $i^{\rm th}$ player. This is in sharp contrast to the size of the joint action space which is $\prod_{i=1}^m A_i$. V-learning (in its basic form) is a new class of single-agent RL algorithms that convert any adversarial bandit algorithm with suitable regret guarantees into a RL algorithm. Similar to the classical Q-learning algorithm, it performs incremental updates to the value functions. Different from Q-learning, it only maintains the estimates of V-values instead of Q-values. This key difference allows V-learning to achieve the claimed guarantees in the MARL setting by simply letting all agents run V-learning independently.