 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Prediction using Generative Adversarial Network in Multi-Class Scenarios
Paper and Code

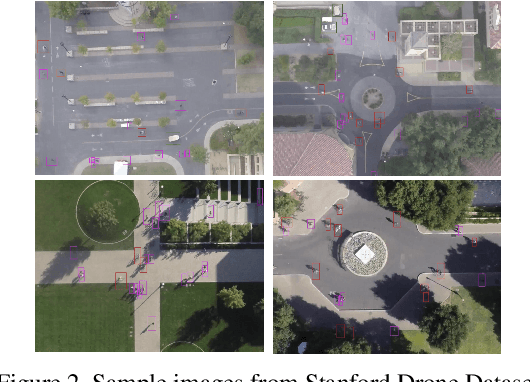
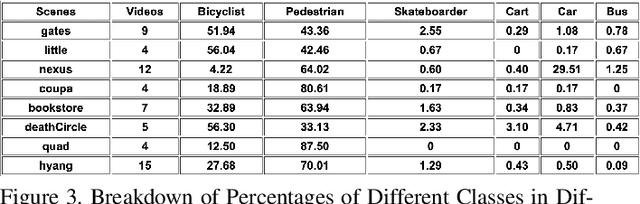
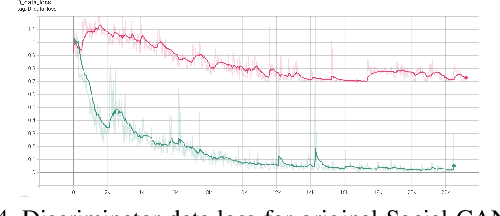
Predicting traffic agents' trajectories is an important task for auto-piloting. Most previous work on trajectory prediction only considers a single class of road agents. We use a sequence-to-sequence model to predict future paths from observed paths and we incorporate class information into the model by concatenating extracted label representations with traditional location inputs. We experiment with both LSTM and transformer encoders and we use generative adversarial network as introduced in Social GAN to learn the multi-modal behavior of traffic agents. We train our model on Stanford Drone dataset which includes 6 classes of road agents and evaluate the impact of different model components on the prediction performance in multi-class scenes.