 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Tactile-enabled Grasping Method for Robotic Fruit Harvesting
Paper and Code
Oct 18, 2021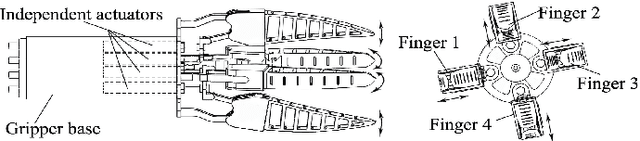
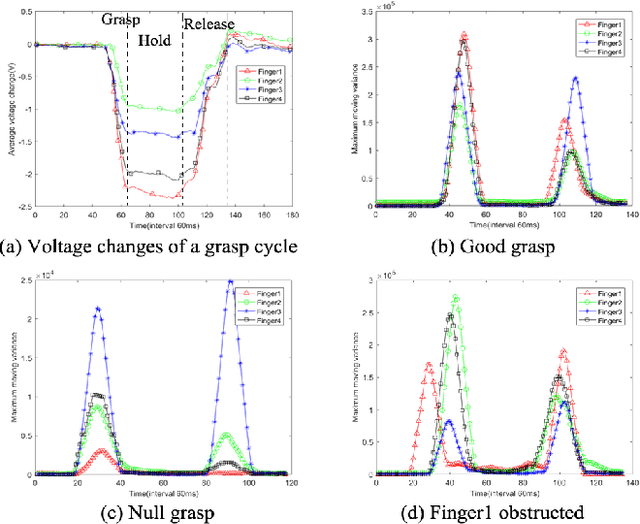
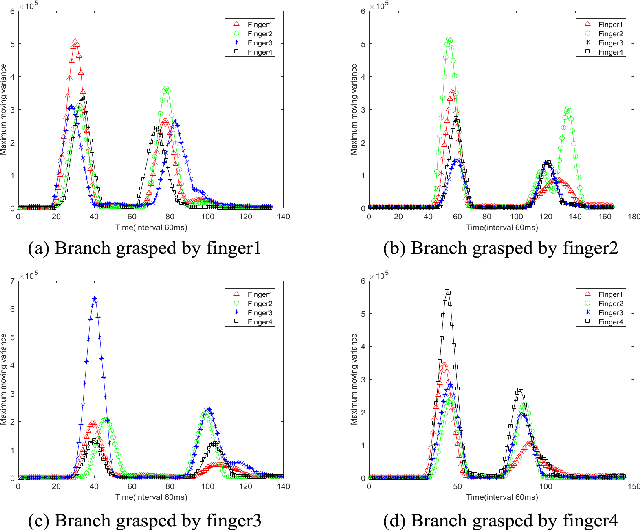
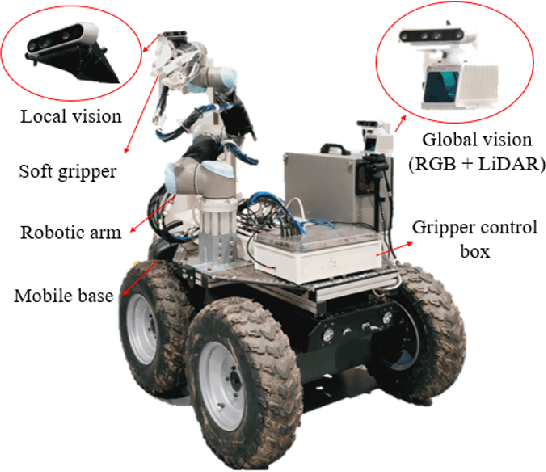
In the robotic crop harvesting environment, foreign objects intrusion in the gripper workspace is frequently occurring and unignorable, however, rarely addressed. This paper presents a novel intelligent robotic grasping method capable of handling obstacle interference, which is the first of its kind in the literature. The proposed method combines deep learning algorithms with low-cost tactile sensing hardware on a multi-DoF soft robotic gripper. Through experimental validations, the proposed method demonstrated promising performance in distinguishing various grasping scenarios. The 4-finger independently controlled gripper presented outstanding adaptability to handle various picking scenarios. The overall performance of this work indicated great potential for solving the robotic fruit harvesting challenges.