 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOffline Reinforcement Learning for Autonomous Driving with Safety and Exploration Enhancement
Paper and Code
Nov 02, 2021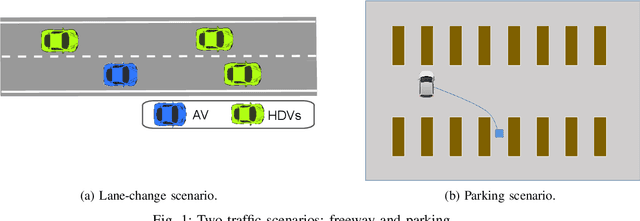
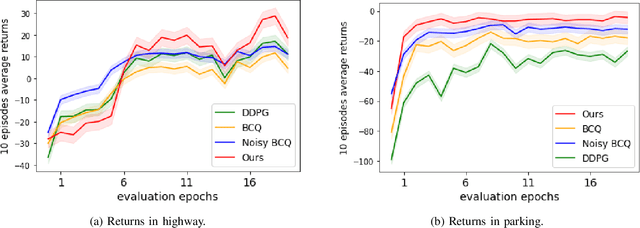
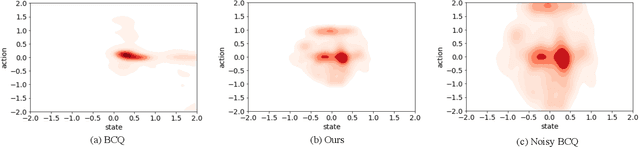
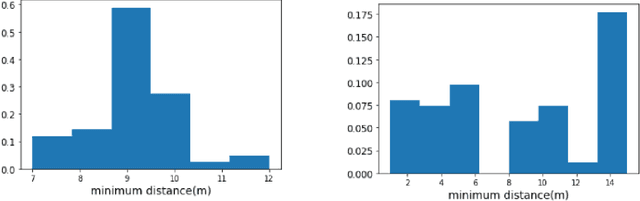
Reinforcement learning (RL) is a powerful data-driven control method that has been largely explored in autonomous driving tasks. However, conventional RL approaches learn control policies through trial-and-error interactions with the environment and therefore may cause disastrous consequences such as collisions when testing in real-world traffic. Offline RL has recently emerged as a promising framework to learn effective policies from previously-collected, static datasets without the requirement of active interactions, making it especially appealing for autonomous driving applications. Despite promising, existing offline RL algorithms such as Batch-Constrained deep Q-learning (BCQ) generally lead to rather conservative policies with limited exploration efficiency. To address such issues, this paper presents an enhanced BCQ algorithm by employing a learnable parameter noise scheme in the perturbation model to increase the diversity of observed actions. In addition, a Lyapunov-based safety enhancement strategy is incorporated to constrain the explorable state space within a safe region. Experimental results in highway and parking traffic scenarios show that our approach outperforms the conventional RL method, as well as state-of-the-art offline RL algorithms.