 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThriftyDAgger: Budget-Aware Novelty and Risk Gating for Interactive Imitation Learning
Paper and Code
Sep 17, 2021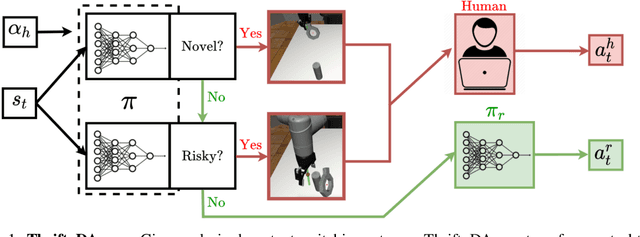
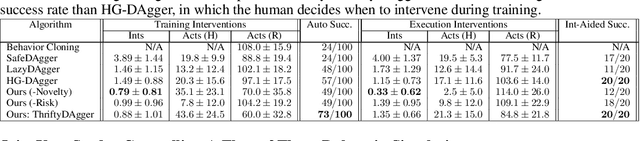
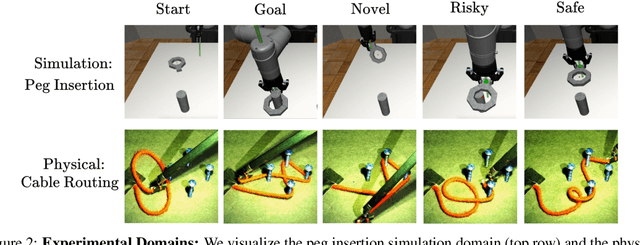

Effective robot learning often requires online human feedback and interventions that can cost significant human time, giving rise to the central challenge in interactive imitation learning: is it possible to control the timing and length of interventions to both facilitate learning and limit burden on the human supervisor? This paper presents ThriftyDAgger, an algorithm for actively querying a human supervisor given a desired budget of human interventions. ThriftyDAgger uses a learned switching policy to solicit interventions only at states that are sufficiently (1) novel, where the robot policy has no reference behavior to imitate, or (2) risky, where the robot has low confidence in task completion. To detect the latter, we introduce a novel metric for estimating risk under the current robot policy. Experiments in simulation and on a physical cable routing experiment suggest that ThriftyDAgger's intervention criteria balances task performance and supervisor burden more effectively than prior algorithms. ThriftyDAgger can also be applied at execution time, where it achieves a 100% success rate on both the simulation and physical tasks. A user study (N=10) in which users control a three-robot fleet while also performing a concentration task suggests that ThriftyDAgger increases human and robot performance by 58% and 80% respectively compared to the next best algorithm while reducing supervisor burden.