 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTTM: Terrain Traversability Mapping for Autonomous Excavator Navigation in Unstructured Environments
Paper and Code
Sep 13, 2021
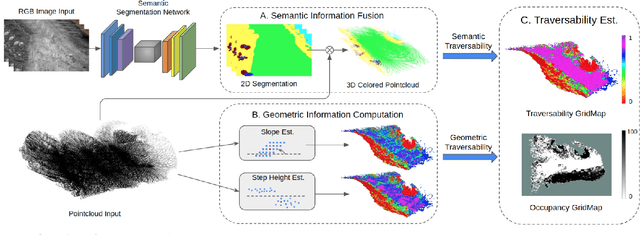
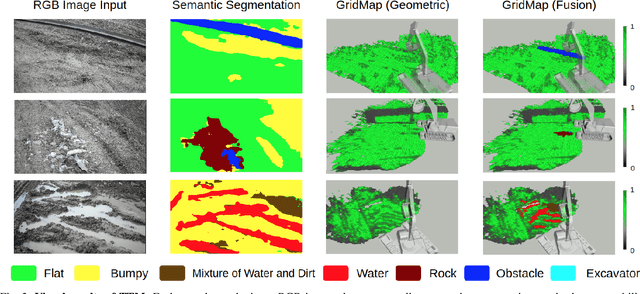
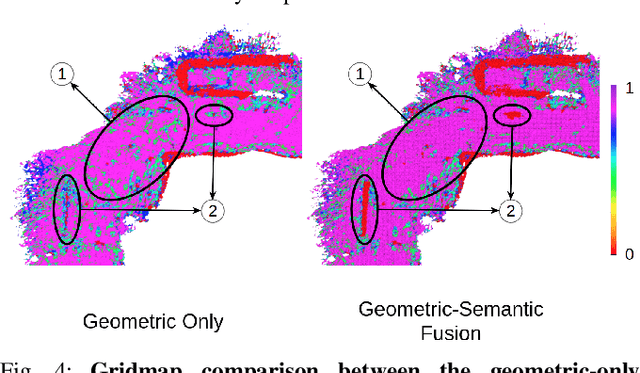
We present Terrain Traversability Mapping (TTM), a real-time mapping approach for terrain traversability estimation and path planning for autonomous excavators in an unstructured environment. We propose an efficient learning-based geometric method to extract terrain features from RGB images and 3D pointclouds and incorporate them into a global map for planning and navigation for autonomous excavation. Our method used the physical characteristics of the excavator, including maximum climbing degree and other machine specifications, to determine the traversable area. Our method can adapt to changing environments and update the terrain information in real-time. Moreover, we prepare a novel dataset, Autonomous Excavator Terrain (AET) dataset, consisting of RGB images from construction sites with seven categories according to navigability. We integrate our mapping approach with planning and control modules in an autonomous excavator navigation system, which outperforms previous method by 49.3% in terms of success rate based on existing planning schemes. With our mapping the excavator can navigate through unstructured environments consisting of deep pits, steep hills, rock piles, and other complex terrain features.