 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStability and Generalization for Randomized Coordinate Descent
Paper and Code
Aug 17, 2021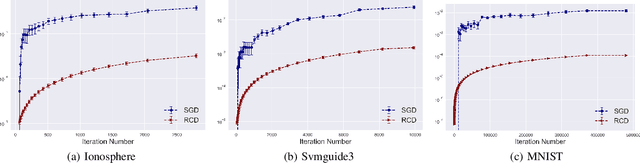
Randomized coordinate descent (RCD) is a popular optimization algorithm with wide applications in solving various machine learning problems, which motivates a lot of theoretical analysis on its convergence behavior. As a comparison, there is no work studying how the models trained by RCD would generalize to test examples. In this paper, we initialize the generalization analysis of RCD by leveraging the powerful tool of algorithmic stability. We establish argument stability bounds of RCD for both convex and strongly convex objectives, from which we develop optimal generalization bounds by showing how to early-stop the algorithm to tradeoff the estimation and optimization. Our analysis shows that RCD enjoys better stability as compared to stochastic gradient descent.