 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust and Dexterous Dual-arm Tele-Cooperation using Fractal Impedance Control
Paper and Code
Aug 10, 2021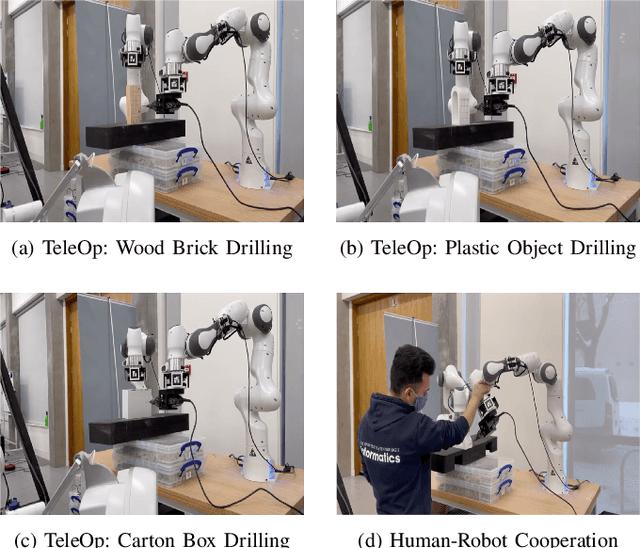
Deploying robots from isolated operations to shared environments has been an increasing trend in robotics for the last decades. However, the requirement of robust interaction in highly variable environments is still beyond the capability of most robots. We proposed to achieve robustness of various interactions by using the Fractal Impedance Control (FIC) and exploiting its non-linear stiffness to adapt to multiple cooperative scenarios, which is applicable to both manipulation and teleoperation applications. The proposed method was evaluated by a wide range of experiments: drilling, moving objects with unknown dynamics, and interacting with humans. The extensive validations demonstrated that the proposed method is very robust in presence of delays and reduced bandwidth in the communication link between master and follower. The results confirmed that the proposed method can enhance the robustness significantly and allow switching tasks freely between manipulation, human-robot cooperation and teleoperation without the need of extensive re-tuning of the controllers.