 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative Localization of Mobile Robots with Multiple Ultra-WideBand Ranging Measurements
Paper and Code
Jul 30, 2021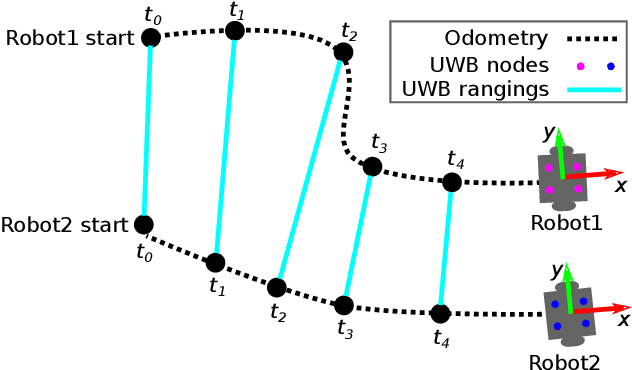
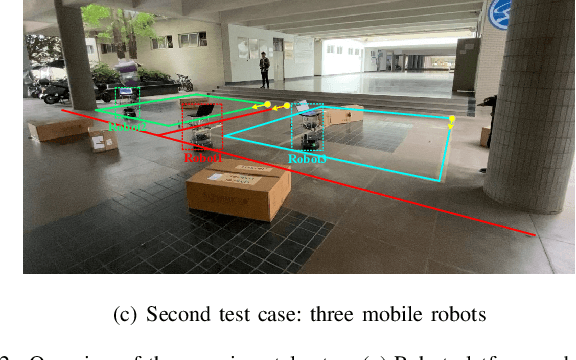
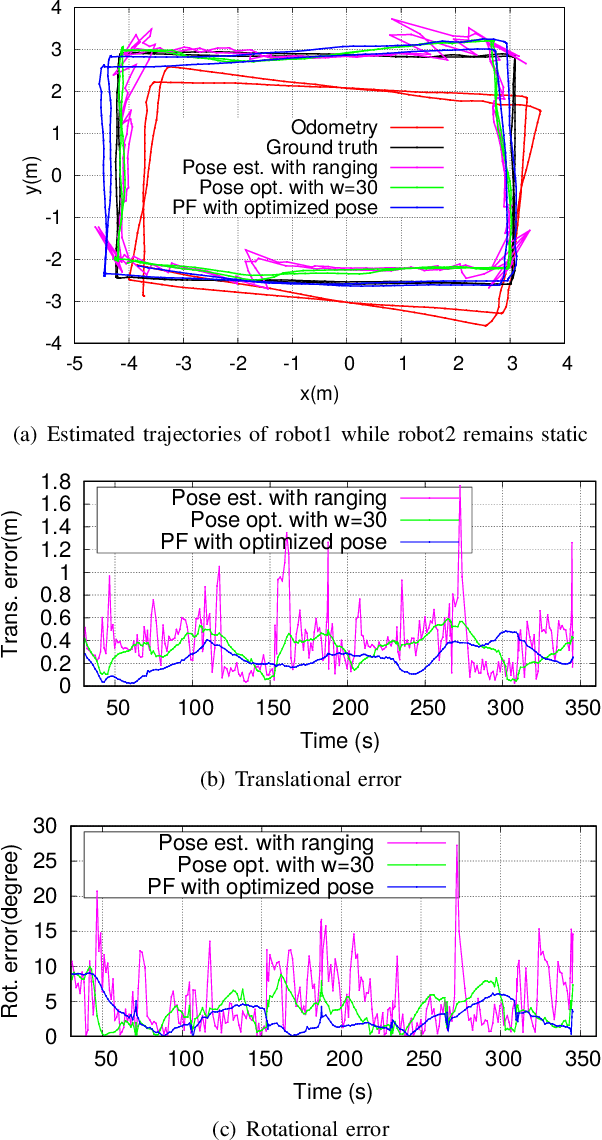
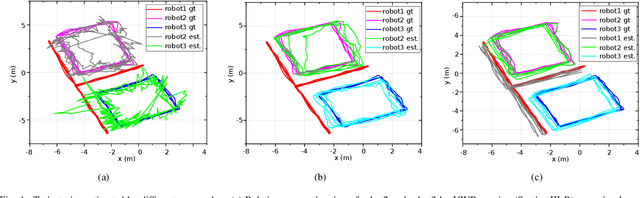
Relative localization between autonomous robots without infrastructure is crucial to achieve their navigation, path planning, and formation in many applications, such as emergency response, where acquiring a prior knowledge of the environment is not possible. The traditional Ultra-WideBand (UWB)-based approach provides a good estimation of the distance between the robots, but obtaining the relative pose (including the displacement and orientation) remains challenging. We propose an approach to estimate the relative pose between a group of robots by equipping each robot with multiple UWB ranging nodes. We determine the pose between two robots by minimizing the residual error of the ranging measurements from all UWB nodes. To improve the localization accuracy, we propose to utilize the odometry constraints through a sliding window-based optimization. The optimized pose is then fused with the odometry in a particle filtering for pose tracking among a group of mobile robots. We have conducted extensive experiments to validate the effectiveness of the proposed approach.