 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Adversarial Imitation Learning using Variational Models
Paper and Code
Jul 16, 2021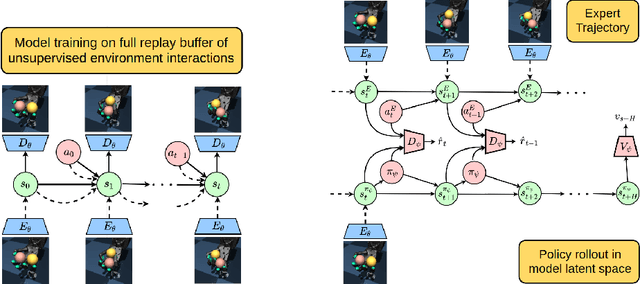
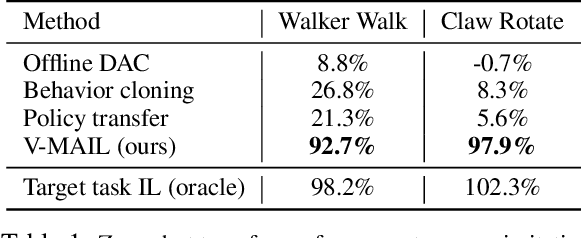

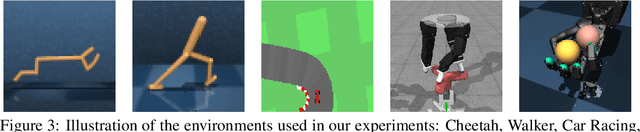
Reward function specification, which requires considerable human effort and iteration, remains a major impediment for learning behaviors through deep reinforcement learning. In contrast, providing visual demonstrations of desired behaviors often presents an easier and more natural way to teach agents. We consider a setting where an agent is provided a fixed dataset of visual demonstrations illustrating how to perform a task, and must learn to solve the task using the provided demonstrations and unsupervised environment interactions. This setting presents a number of challenges including representation learning for visual observations, sample complexity due to high dimensional spaces, and learning instability due to the lack of a fixed reward or learning signal. Towards addressing these challenges, we develop a variational model-based adversarial imitation learning (V-MAIL) algorithm. The model-based approach provides a strong signal for representation learning, enables sample efficiency, and improves the stability of adversarial training by enabling on-policy learning. Through experiments involving several vision-based locomotion and manipulation tasks, we find that V-MAIL learns successful visuomotor policies in a sample-efficient manner, has better stability compared to prior work, and also achieves higher asymptotic performance. We further find that by transferring the learned models, V-MAIL can learn new tasks from visual demonstrations without any additional environment interactions. All results including videos can be found online at \url{https://sites.google.com/view/variational-mail}.