 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVIN: Voxel-based Implicit Network for Joint 3D Object Detection and Segmentation for Lidars
Paper and Code
Jul 07, 2021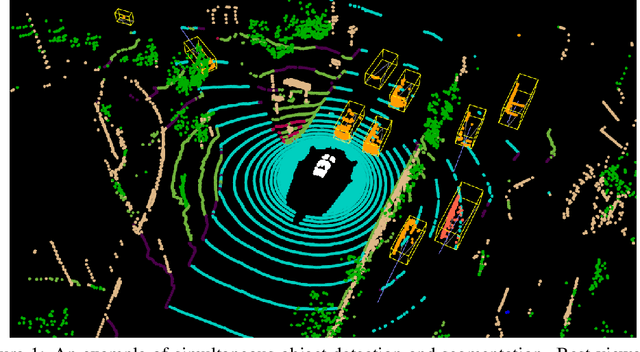
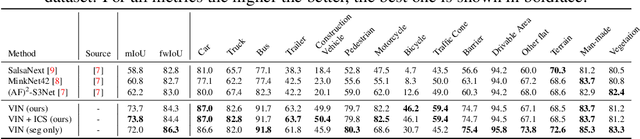
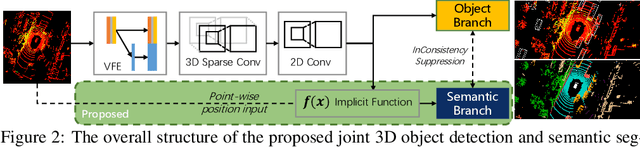
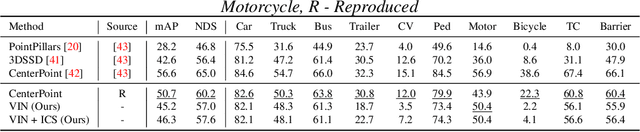
A unified neural network structure is presented for joint 3D object detection and point cloud segmentation in this paper. We leverage rich supervision from both detection and segmentation labels rather than using just one of them. In addition, an extension based on single-stage object detectors is proposed based on the implicit function widely used in 3D scene and object understanding. The extension branch takes the final feature map from the object detection module as input, and produces an implicit function that generates semantic distribution for each point for its corresponding voxel center. We demonstrated the performance of our structure on nuScenes-lidarseg, a large-scale outdoor dataset. Our solution achieves competitive results against state-of-the-art methods in both 3D object detection and point cloud segmentation with little additional computation load compared with object detection solutions. The capability of efficient weakly supervision semantic segmentation of the proposed method is also validated by experiments.