 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA guidance and maneuvering control system design with anti-collision using stream functions with vortex flows for autonomous marine vessels
Paper and Code
Jun 04, 2021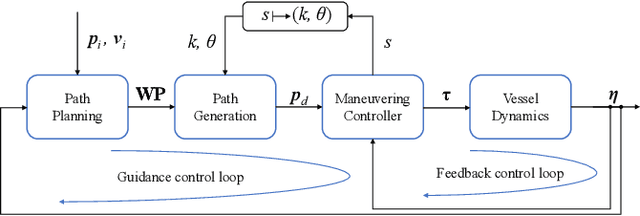
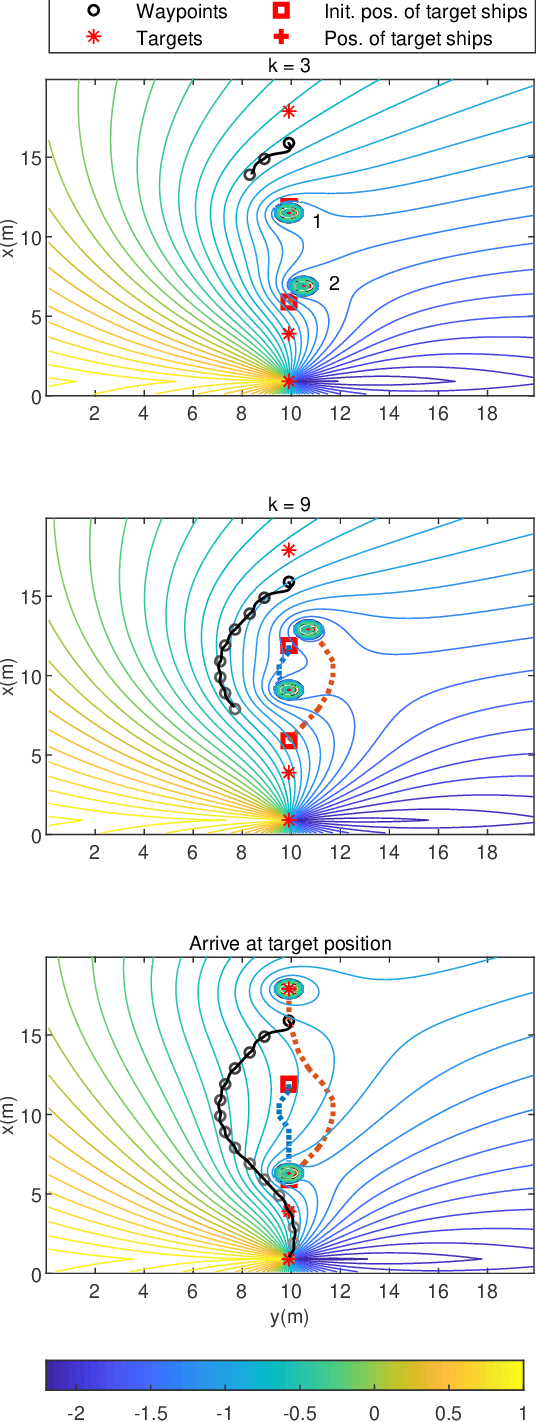
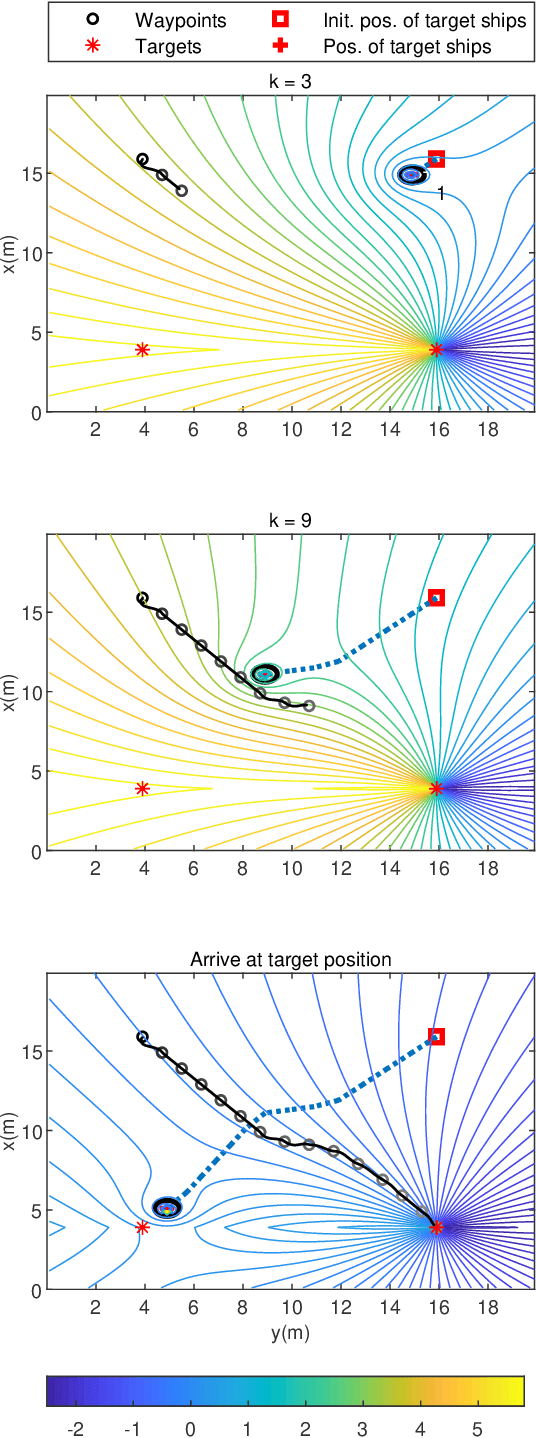
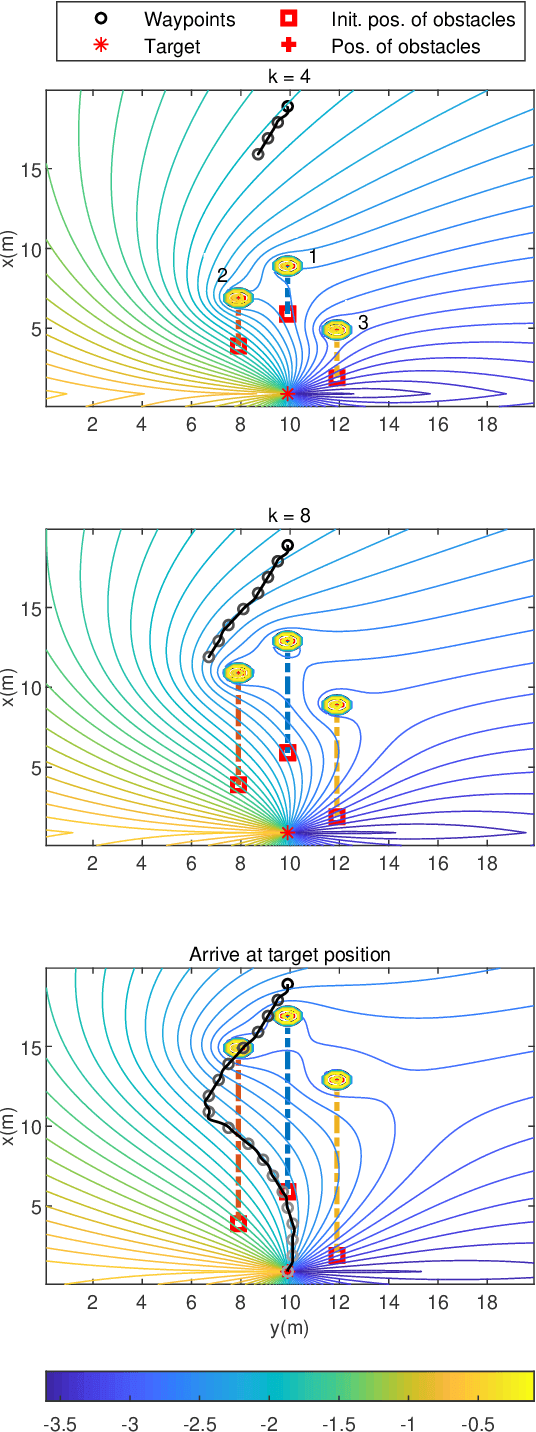
Autonomous marine vessels are expected to avoid inter-vessel collisions and comply with the international regulations for safe voyages. This paper presents a stepwise path planning method using stream functions. The dynamic flow of fluids is used as a guidance model, where the collision avoidance in static environments is achieved by applying the circular theorem in the sink flow. We extend this method to dynamic environments by adding vortex flows in the flow field. The stream function is recursively updated to enable on the fly waypoint decisions. The vessel avoids collisions and also complies with several rules of the Convention on the International Regulations for Preventing Collisions at Sea. The method is conceptually and computationally simple and convenient to tune, and yet versatile to handle complex and dense marine traffic with multiple dynamic obstacles. The ship dynamics are taken into account, by using Bezier curves to generate a sufficiently smooth path with feasible curvature. Numerical simulations are conducted to verify the proposed method.