 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust multi-sensor GLMB filter: An application to multi-target tracking with bearing-only sensors
Paper and Code
Jun 01, 2021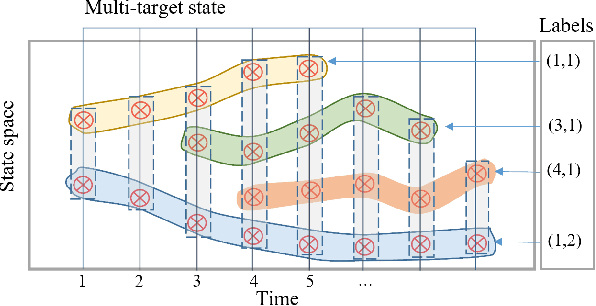
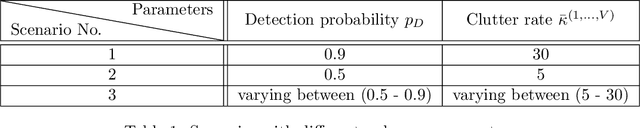
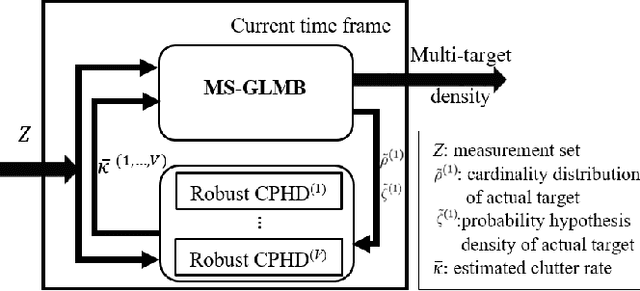

This paper proposes an efficient and robust algorithm to estimate target trajectories via multi-sensor bearing-only measurements with unknown target detection profiles and clutter rates. In particular, we propose to combine the multi-sensor Generalized Labeled Multi-Bernoulli (MS-GLMB) filter to estimate target trajectories and robust Cardinalized Probability Hypothesis Density (CPHD) filters to estimate the clutter rates. Experimental results show that the proposed robust filter exhibits near-optimal performance in the sense that it is comparable to the optimal MS-GLMB operating with the true clutter rate. More importantly, it outperforms other studied filters when the detection profile and clutter rate are unknown an time-variant. This is attributed to the ability of the robust filter to learn the background parameters on-the-fly.