 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePose2Drone: A Skeleton-Pose-based Framework for Human-Drone Interaction
Paper and Code
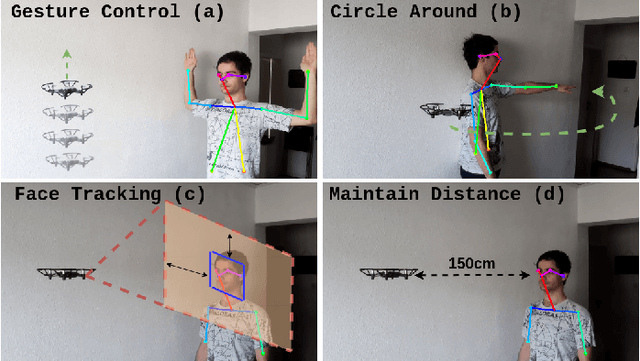

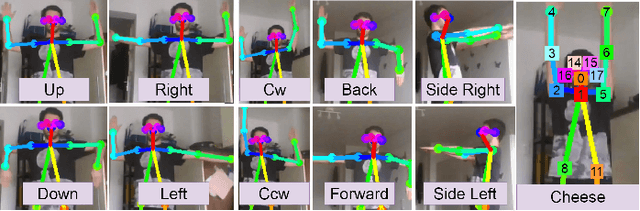
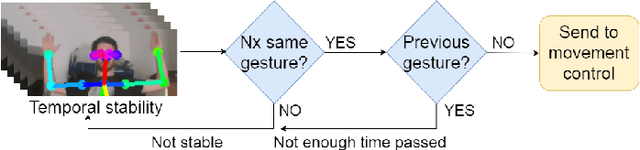
Drones have become a common tool, which is utilized in many tasks such as aerial photography, surveillance, and delivery. However, operating a drone requires more and more interaction with the user. A natural and safe method for Human-Drone Interaction (HDI) is using gestures. In this paper, we introduce an HDI framework building upon skeleton-based pose estimation. Our framework provides the functionality to control the movement of the drone with simple arm gestures and to follow the user while keeping a safe distance. We also propose a monocular distance estimation method, which is entirely based on image features and does not require any additional depth sensors. To perform comprehensive experiments and quantitative analysis, we create a customized testing dataset. The experiments indicate that our HDI framework can achieve an average of 93.5\% accuracy in the recognition of 11 common gestures. The code is available at: https://github.com/Zrrr1997/Pose2Drone