 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResource Allocation and Service Provisioning in Multi-Agent Cloud Robotics: A Comprehensive Survey
Paper and Code
Apr 29, 2021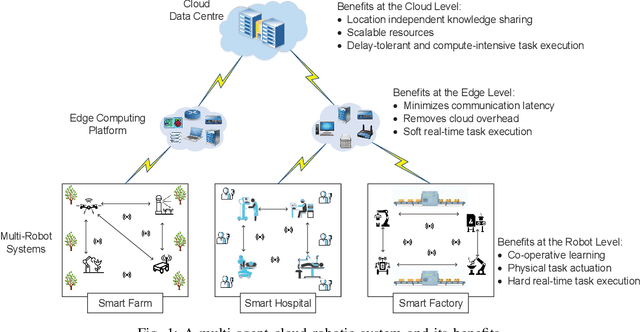
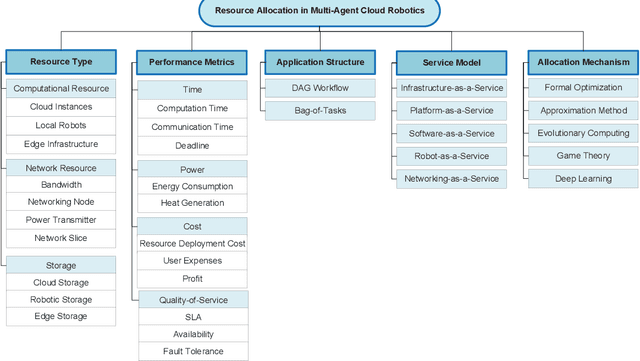
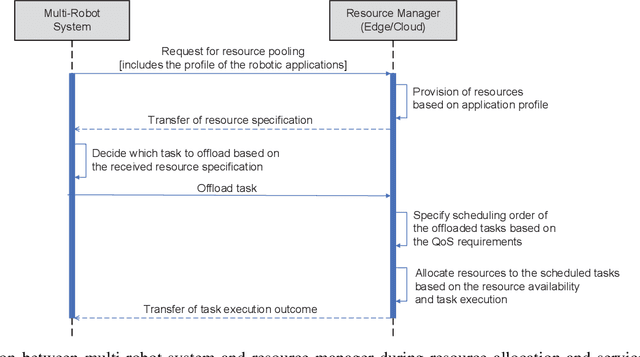
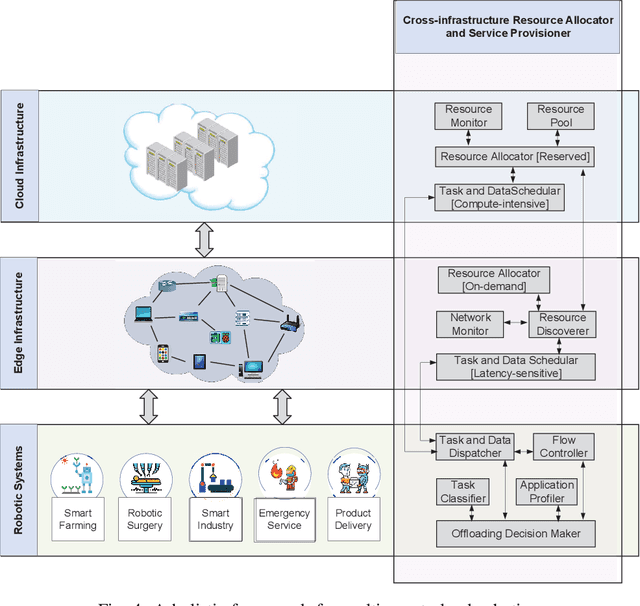
Robotic applications nowadays are widely adopted to enhance operational automation and performance of real-world Cyber-Physical Systems (CPSs) including Industry 4.0, agriculture, healthcare, and disaster management. These applications are composed of latency-sensitive, data-heavy, and compute-intensive tasks. The robots, however, are constrained in the computational power and storage capacity. The concept of multi-agent cloud robotics enables robot-to-robot cooperation and creates a complementary environment for the robots in executing large-scale applications with the capability to utilize the edge and cloud resources. However, in such a collaborative environment, the optimal resource allocation for robotic tasks is challenging to achieve. Heterogeneous energy consumption rates and application of execution costs associated with the robots and computing instances make it even more complex. In addition, the data transmission delay between local robots, edge nodes, and cloud data centres adversely affects the real-time interactions and impedes service performance guarantee. Taking all these issues into account, this paper comprehensively surveys the state-of-the-art on resource allocation and service provisioning in multi-agent cloud robotics. The paper presents the application domains of multi-agent cloud robotics through explicit comparison with the contemporary computing paradigms and identifies the specific research challenges. A complete taxonomy on resource allocation is presented for the first time, together with the discussion of resource pooling, computation offloading, and task scheduling for efficient service provisioning. Furthermore, we highlight the research gaps from the learned lessons, and present future directions deemed beneficial to further advance this emerging field.