 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeASFM-Net: Asymmetrical Siamese Feature Matching Network for Point Completion
Paper and Code
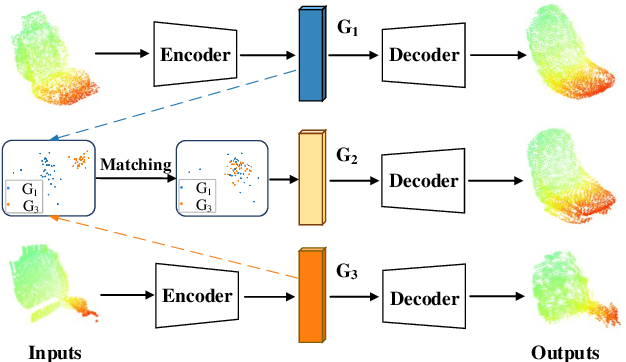

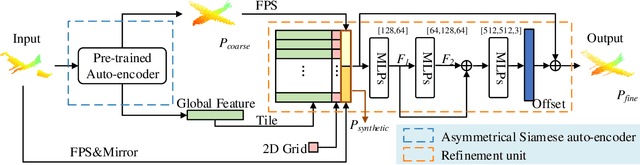
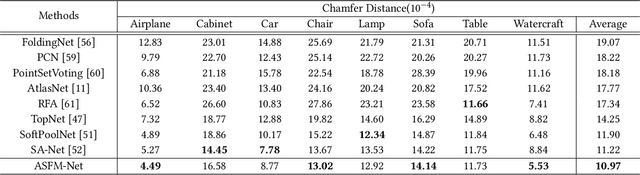
We tackle the problem of object completion from point clouds and propose a novel point cloud completion network employing an asymmetrical Siamese feature matching strategy, termed as ASFM-Net. Specifically, the asymmetrical Siamese auto-encoder neural network is adopted to map the partial and complete input point cloud into a shared latent space, which can capture detailed shape prior. Then we design an iterative refinement unit to generate complete shapes with fine-grained details by integrating prior information. Experiments are conducted on PCN dataset and Completion3D benchmark, demonstrating the state-of-the-art performance of the proposed ASFM-Net. Our method achieves the 1st place in the leaderboard of Completion3D and outperforms existing methods with a large margin, about 12%. Codes will be open-sourced.