 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometry-based Distance Decomposition for Monocular 3D Object Detection
Paper and Code
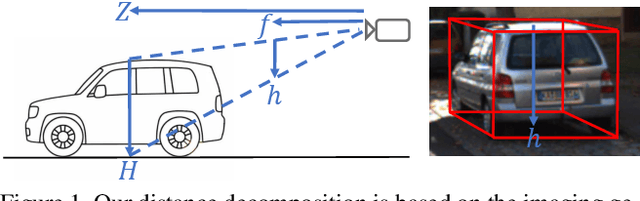
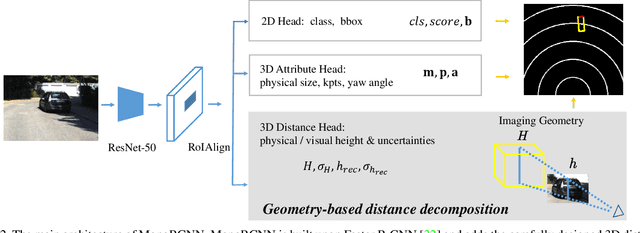
Monocular 3D object detection is of great significance for autonomous driving but remains challenging. The core challenge is to predict the distance of objects in the absence of explicit depth information. Unlike regressing the distance as a single variable in most existing methods, we propose a novel geometry-based distance decomposition to recover the distance by its factors. The decomposition factors the distance of objects into the most representative and stable variables, i.e. the physical height and the projected visual height in the image plane. Moreover, the decomposition maintains the self-consistency between the two heights, leading to the robust distance prediction when both predicted heights are inaccurate. The decomposition also enables us to trace the cause of the distance uncertainty for different scenarios. Such decomposition makes the distance prediction interpretable, accurate, and robust. Our method directly predicts 3D bounding boxes from RGB images with a compact architecture, making the training and inference simple and efficient. The experimental results show that our method achieves the state-of-the-art performance on the monocular 3D Object detection and Birds Eye View tasks on the KITTI dataset, and can generalize to images with different camera intrinsics.