 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimising the selection of samples for robust lidar camera calibration
Paper and Code
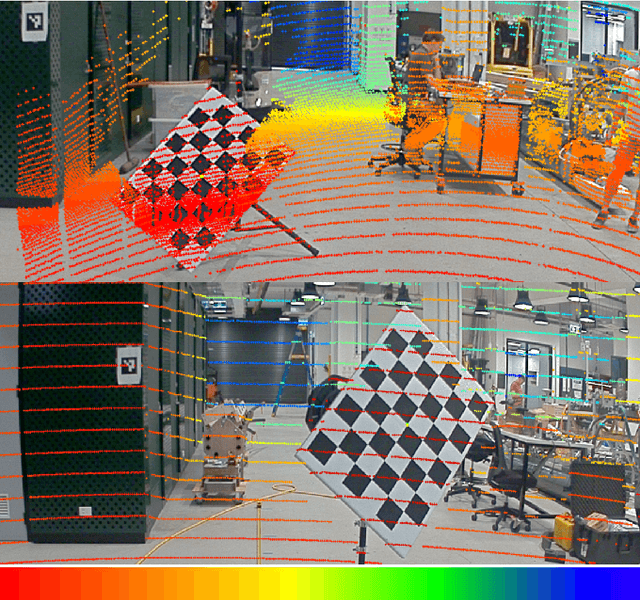
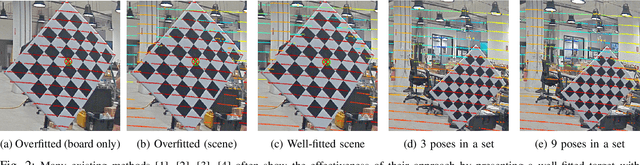
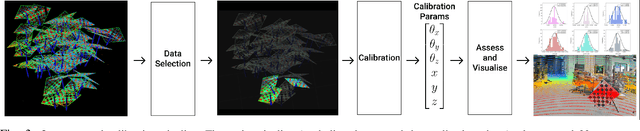
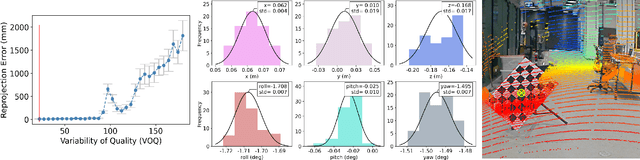
We propose a robust calibration pipeline that optimises the selection of calibration samples for the estimation of calibration parameters that fit the entire scene. We minimise user error by automating the data selection process according to a metric, called Variability of Quality (VOQ) that gives a score to each calibration set of samples. We show that this VOQ score is correlated with the estimated calibration parameter's ability to generalise well to the entire scene, thereby overcoming the overfitting problems of existing calibration algorithms. Our approach has the benefits of simplifying the calibration process for practitioners of any calibration expertise level and providing an objective measure of the quality for our calibration pipeline's input and output data. We additionally use a novel method of assessing the accuracy of the calibration parameters. It involves computing reprojection errors for the entire scene to ensure that the parameters are well fitted to all features in the scene. Our proposed calibration pipeline takes 90s, and obtains an average reprojection error of 1-1.2cm, with standard deviation of 0.4-0.5cm over 46 poses evenly distributed in a scene. This process has been validated by experimentation on a high resolution, software definable lidar, Baraja Spectrum-Scan; and a low, fixed resolution lidar, Velodyne VLP-16. We have shown that despite the vast differences in lidar technologies, our proposed approach manages to estimate robust calibration parameters for both. Our code and data set used for this paper are made available as open-source.