 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtended Task and Motion Planning of Long-horizon Robot Manipulation
Paper and Code
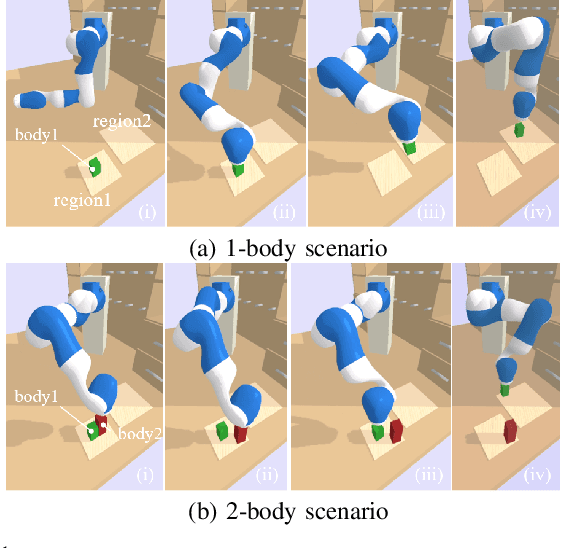
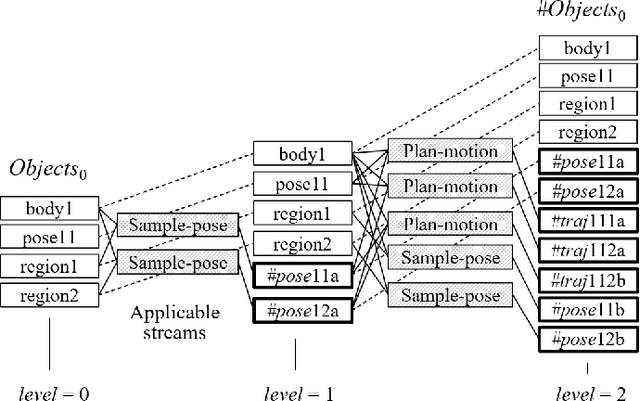
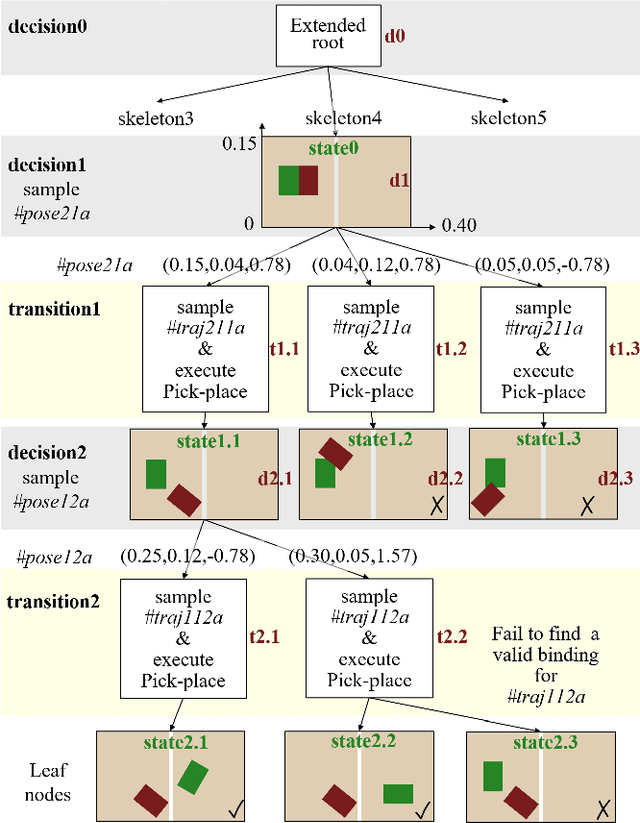

Task and Motion Planning (TAMP) requires the integration of symbolic reasoning with metric motion planning that accounts for the robot's actions' geometric feasibility. This hierarchical structure inevitably prevents the symbolic planners from accessing the environment's low-level geometric description, vital to the problem's solution. Most TAMP approaches fail to provide feasible solutions when there is missing knowledge about the environment at the symbolic level. The incapability of devising alternative high-level plans leads existing planners to a dead end. We propose a novel approach for decision-making on extended decision spaces over plan skeletons and action parameters. We integrate top-k planning for constructing an explicit skeleton space, where a skeleton planner generates a variety of candidate skeleton plans. Moreover, we effectively combine this skeleton space with the resultant motion parameter spaces into a single extended decision space. Accordingly, we use Monte-Carlo Tree Search (MCTS) to ensure an exploration-exploitation balance at each decision node and optimize globally to produce minimum-cost solutions. The proposed seamless combination of symbolic top-k planning with streams, with the proved optimality of MCTS, leads to a powerful planning algorithm that can handle the combinatorial complexity of long-horizon manipulation tasks. We empirically evaluate our proposed algorithm in challenging manipulation tasks with different domains that require multi-stage decisions and show how our method can overcome dead-ends through its effective alternate plans compared to its most competitive baseline method.