 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRover Relocalization for Mars Sample Return by Virtual Template Synthesis and Matching
Paper and Code
Mar 05, 2021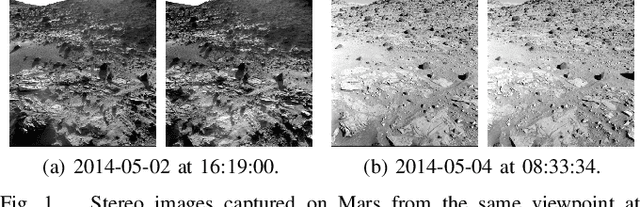
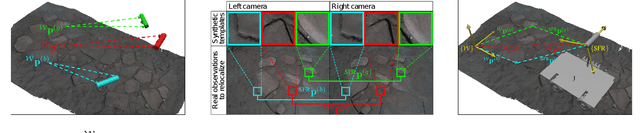
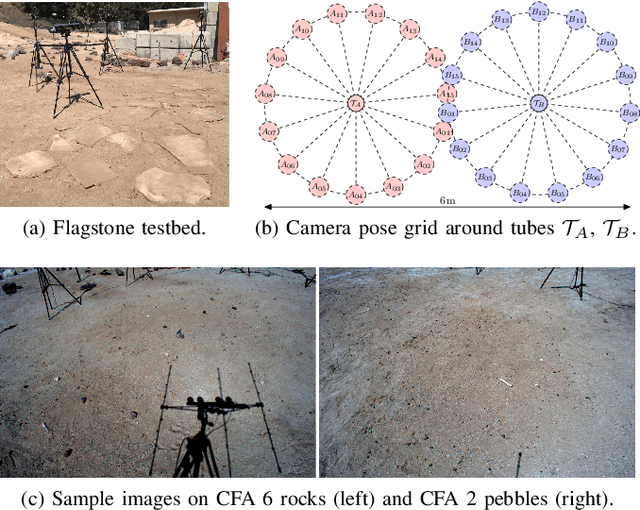
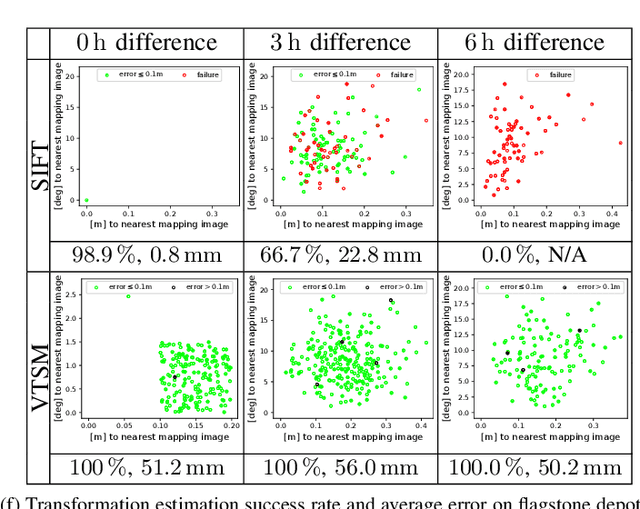
We consider the problem of rover relocalization in the context of the notional Mars Sample Return campaign. In this campaign, a rover (R1) needs to be capable of autonomously navigating and localizing itself within an area of approximately 50 x 50 m using reference images collected years earlier by another rover (R0). We propose a visual localizer that exhibits robustness to the relatively barren terrain that we expect to find in relevant areas, and to large lighting and viewpoint differences between R0 and R1. The localizer synthesizes partial renderings of a mesh built from reference R0 images and matches those to R1 images. We evaluate our method on a dataset totaling 2160 images covering the range of expected environmental conditions (terrain, lighting, approach angle). Experimental results show the effectiveness of our approach. This work informs the Mars Sample Return campaign on the choice of a site where Perseverance (R0) will place a set of sample tubes for future retrieval by another rover (R1).