 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation and Planning of Exploration Over Grid Map Using A Spatiotemporal Model with Incomplete State Observations
Paper and Code
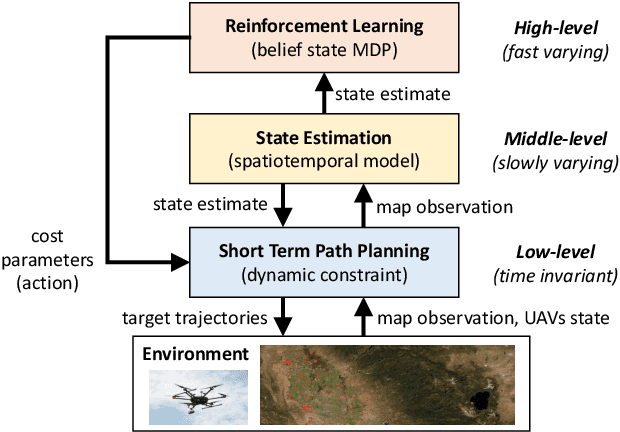
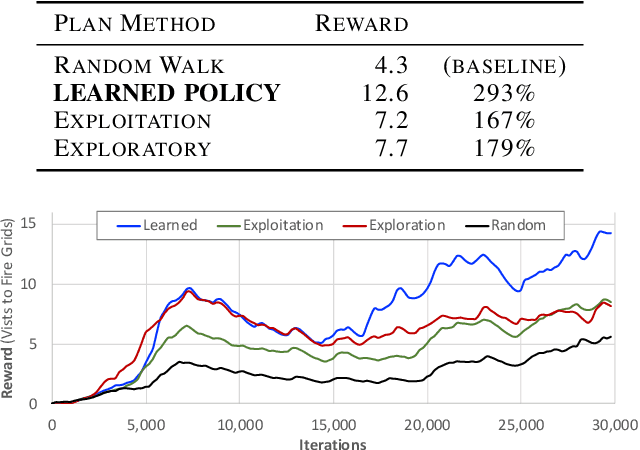
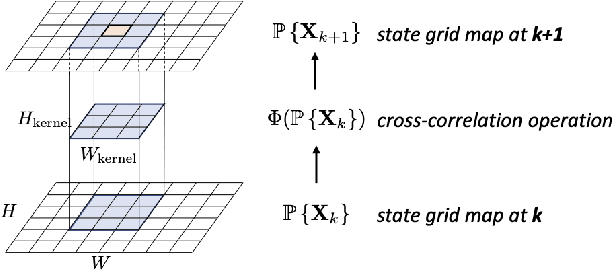
Path planning over spatiotemporal models can be applied to a variety of applications such as UAVs searching for spreading wildfire in mountains or network of balloons in time-varying atmosphere deployed for inexpensive internet service. A notable aspect in such applications is the dynamically changing environment. However, path planning algorithms often assume static environments and only consider the vehicle's dynamics exploring the environment. We present a spatiotemporal model that uses a cross-correlation operator to consider spatiotemporal dependence. Also, we present an adaptive state estimation for path planning. Since the state estimation depends on the vehicle's path, the path planning needs to consider the trade-off between exploration and exploitation. We use a high-level decision-maker to choose an explorative path or an exploitative path. The overall proposed framework consists of an adaptive state estimator, a short-term path planner, and a high-level decision-maker. We tested the framework with a spatiotemporal model simulation where the state of each grid transits from normal, latent, and fire state. For the mission objective of visiting the grids with fire, the proposed framework outperformed the random walk (baseline) and the single-minded exploitation (or exploration) path.