 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmbedding manifold structures into Kalman filters
Paper and Code
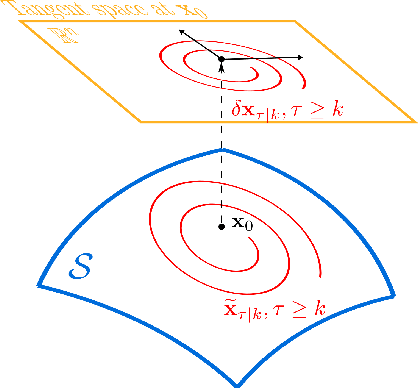
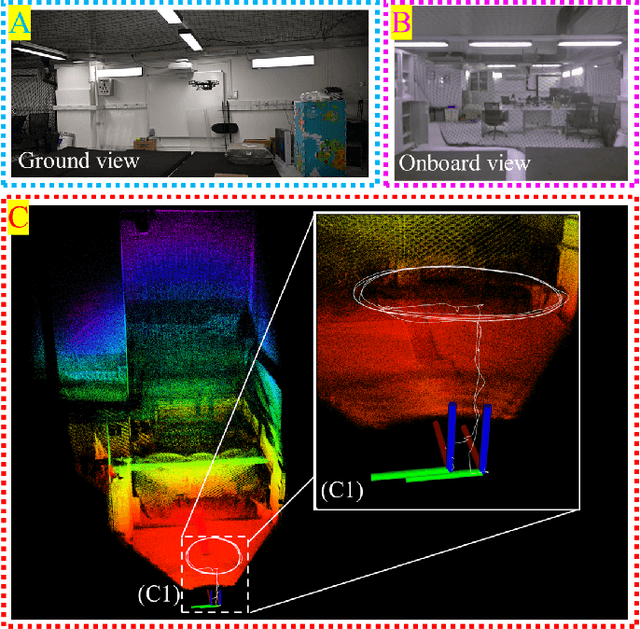
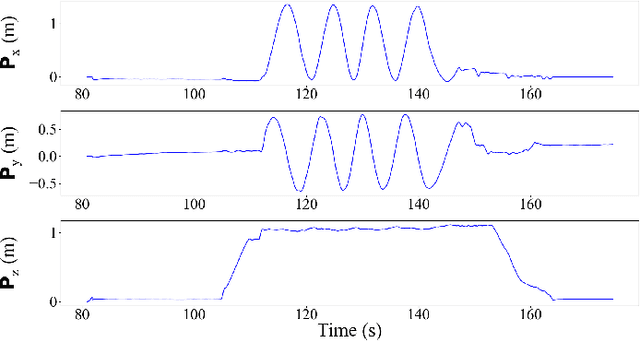
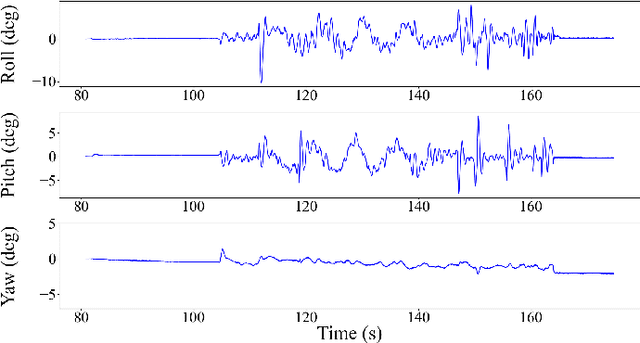
Error-state Kalman filter is an elegant and effective filtering technique for robotic systems operating on manifolds. To avoid the tedious and repetitive derivations for implementing an error-state Kalman filter for a certain system, this paper proposes a generic symbolic representation for error-state Kalman filters on manifolds. Utilizing the $\boxplus\backslash\boxminus$ operations and further defining a $\oplus$ operation on the respective manifold, we propose a canonical representation of the robotic system, which enables us to separate the manifold structures from the system descriptions in each step of the Kalman filter, ultimately leading to a generic, symbolic and manifold-embedding Kalman filter framework. This proposed Kalman filter framework can be used by only casting the system model into the canonical form without going through the cumbersome hand-derivation of the on-manifold Kalman filter. This is particularly useful when the robotic system is of high dimension. Furthermore, the manifold-embedding Kalman filter is implemented as a toolkit in $C$++, with which an user needs only to define the system, and call the respective filter steps (e.g., propagation, update) according to the events (e.g., reception of input, reception of measurement). The existing implementation supports full iterated Kalman filtering for systems on manifold $\mathcal{S} = \mathbb{R}^m \times SO(3) \times \cdots \times SO(3) \times \mathbb{S}^2 \times \cdots \times \mathbb{S}^2 $ or any of its sub-manifolds, and is extendable to other types of manifold when necessary. The proposed symbolic Kalman filter and the developed toolkit are verified by implementing a tightly-coupled lidar-inertial navigation system. Results show superior filtering performances and computation efficiency comparable to hand-engineered counterparts. Finally, the toolkit is opened sourced at https://github.com/hku-mars/IKFoM.