 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Knee Tracking Control to Mimic the Intact Human Knee Profile Based on Actor-critic Reinforcement Learning
Paper and Code
Jan 22, 2021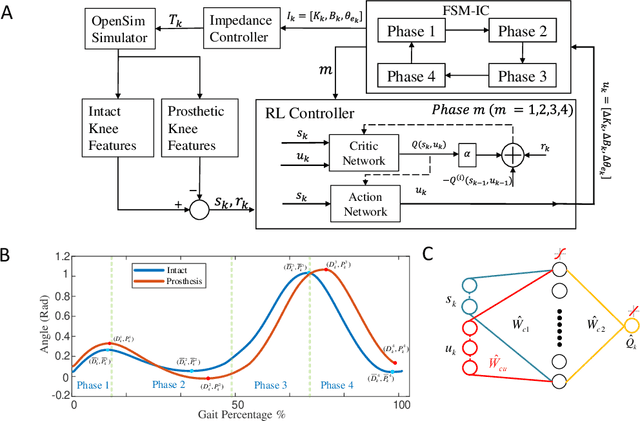
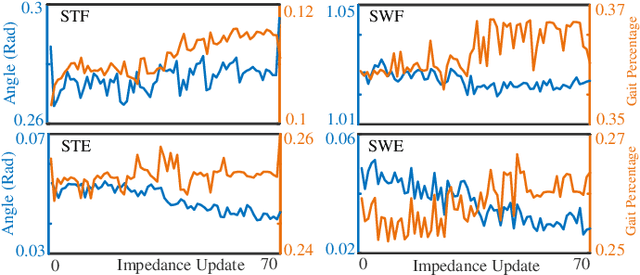
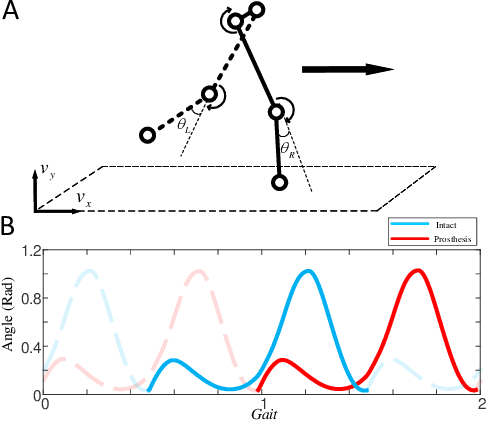
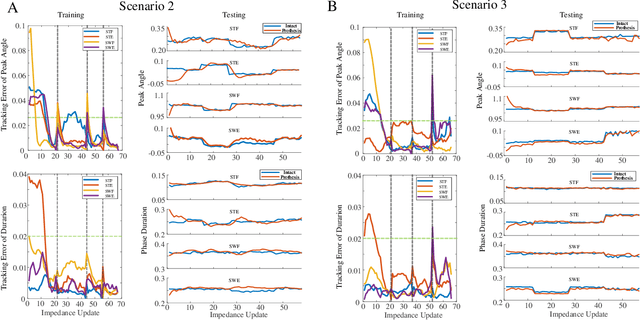
We address a state-of-the-art reinforcement learning (RL) control approach to automatically configure robotic prosthesis impedance parameters to enable end-to-end, continuous locomotion intended for transfemoral amputee subjects. Specifically, our actor-critic based RL provides tracking control of a robotic knee prosthesis to mimic the intact knee profile. This is a significant advance from our previous RL based automatic tuning of prosthesis control parameters which have centered on regulation control with a designer prescribed robotic knee profile as the target. In addition to presenting the complete tracking control algorithm based on direct heuristic dynamic programming (dHDP), we provide an analytical framework for the tracking controller with constrained inputs. We show that our proposed tracking control possesses several important properties, such as weight convergence of the learning networks, Bellman (sub)optimality of the cost-to-go value function and control input, and practical stability of the human-robot system under input constraint. We further provide a systematic simulation of the proposed tracking control using a realistic human-robot system simulator, the OpenSim, to emulate how the dHDP enables level ground walking, walking on different terrains and at different paces. These results show that our proposed dHDP based tracking control is not only theoretically suitable, but also practically useful.