 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning based Multi-Robot Classification via Scalable Communication Structure
Paper and Code
Dec 18, 2020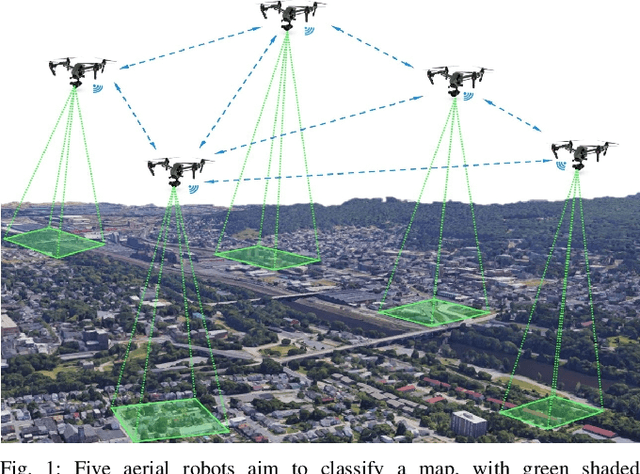
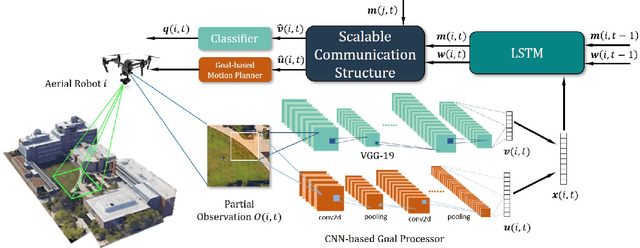
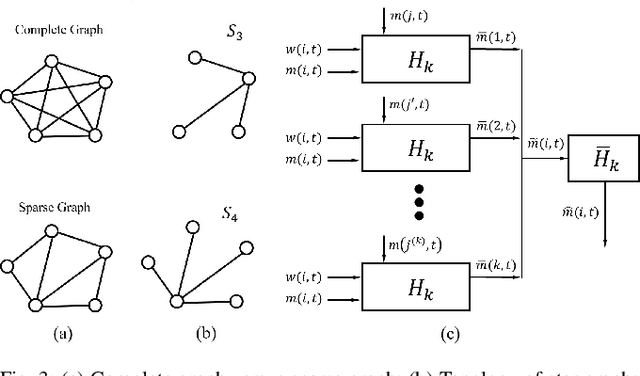
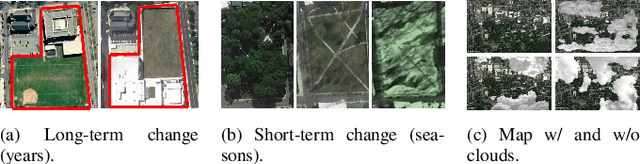
In the multi-robot collaboration domain, training with Reinforcement Learning (RL) can become intractable, and performance starts to deteriorate drastically as the number of robots increases. In this work, we proposed a distributed multi-robot learning architecture with a scalable communication structure capable of learning a robust communication policy for time-varying communication topology. We construct the communication structure with Long-Short Term Memory (LSTM) cells and star graphs, in which the computational complexity of the proposed learning algorithm scales linearly with the number of robots and suitable for application with a large number of robots. The proposed methodology is validated with a map classification problem in the simulated environment. It is shown that the proposed architecture achieves a comparable classification accuracy with the centralized methods, maintains high performance with various numbers of robots without additional training cost, and robust to hacking and loss of the robots in the network.