 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Inference and Behavior Trees for Reactive Action Planning and Execution in Robotics
Paper and Code
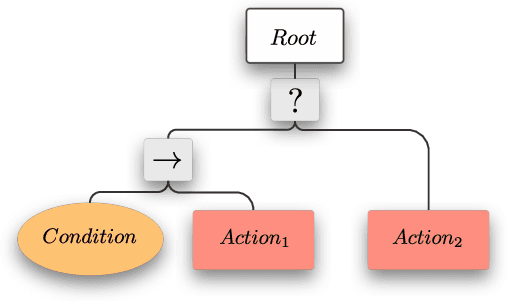
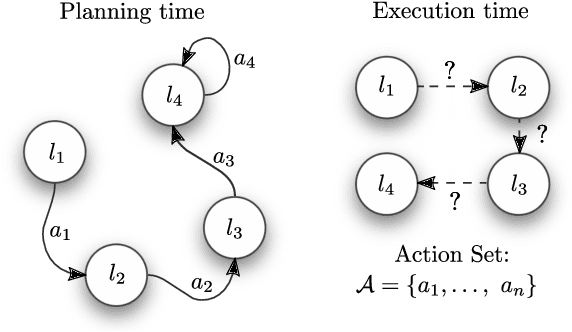
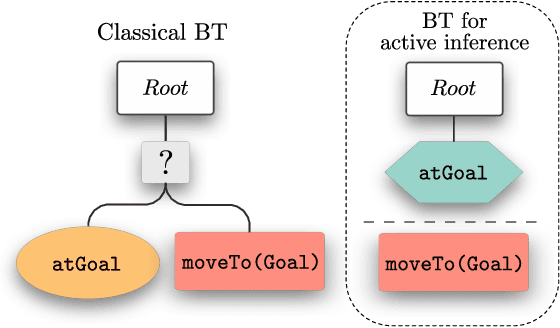
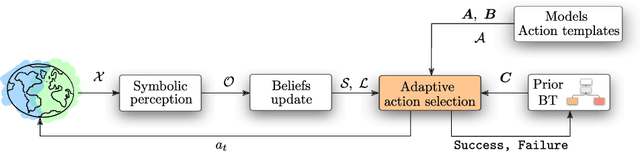
This paper presents how the hybrid combination of behavior trees and the neuroscientific principle of active inference can be used for action planning and execution for reactive robot behaviors in dynamic environments. We show how complex robotic tasks can be formulated as a free-energy minimisation problem, and how state estimation and symbolic decision making are handled within the same framework. The general behavior is specified offline through behavior trees, where the leaf nodes represent desired states, not actions as in classical behavior trees. The decision of which action to execute to reach a state is left to the online active inference routine, in order to resolve unexpected contingencies. This hybrid combination improves the robustness of plans specified through behavior trees, while allowing to cope with the curse of dimensionality in active inference. The properties of the proposed algorithm are analysed in terms of robustness and convergence, and the theoretical results are validated using a mobile manipulator in a retail environment.