Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeACRONYM: A Large-Scale Grasp Dataset Based on Simulation
Paper and Code
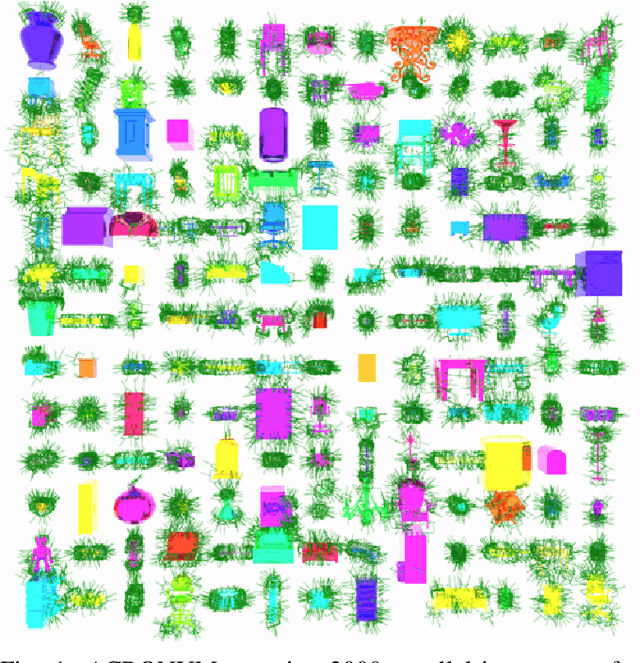
We introduce ACRONYM, a dataset for robot grasp planning based on physics simulation. The dataset contains 17.7M parallel-jaw grasps, spanning 8872 objects from 262 different categories, each labeled with the grasp result obtained from a physics simulator. We show the value of this large and diverse dataset by using it to train two state-of-the-art learning-based grasp planning algorithms. Grasp performance improves significantly when compared to the original smaller dataset. Data and tools can be accessed at https://sites.google.com/nvidia.com/graspdataset.
View paper on