Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning with Time-dependent Goals for Robotic Musicians
Paper and Code
Nov 11, 2020
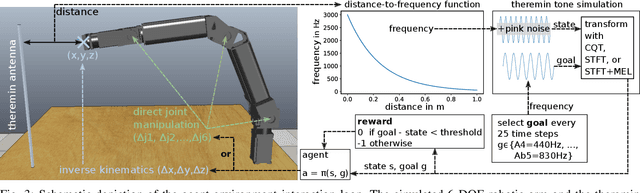
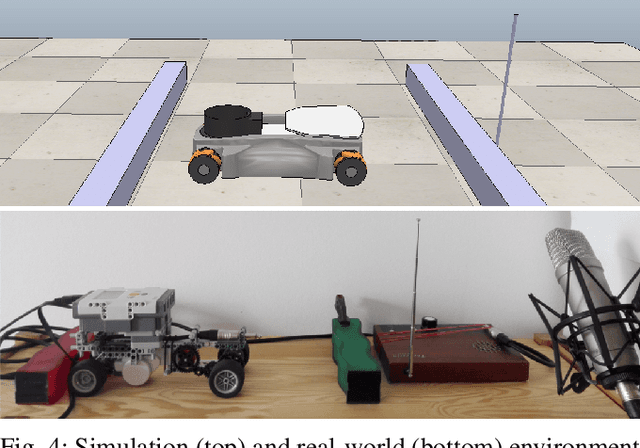
Reinforcement learning is a promising method to accomplish robotic control tasks. The task of playing musical instruments is, however, largely unexplored because it involves the challenge of achieving sequential goals - melodies - that have a temporal dimension. In this paper, we address robotic musicianship by introducing a temporal extension to goal-conditioned reinforcement learning: Time-dependent goals. We demonstrate that these can be used to train a robotic musician to play the theremin instrument. We train the robotic agent in simulation and transfer the acquired policy to a real-world robotic thereminist. Supplemental video: https://youtu.be/jvC9mPzdQN4
* Preprint, submitted to IEEE Robotics and Automation Letters (RA-L)
2021 with International Conference on Robotics and Automation Conference
Option (ICRA) 2021
View paper on