 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoft Hybrid Aerial Vehicle via Bistable Mechanism
Paper and Code
Nov 01, 2020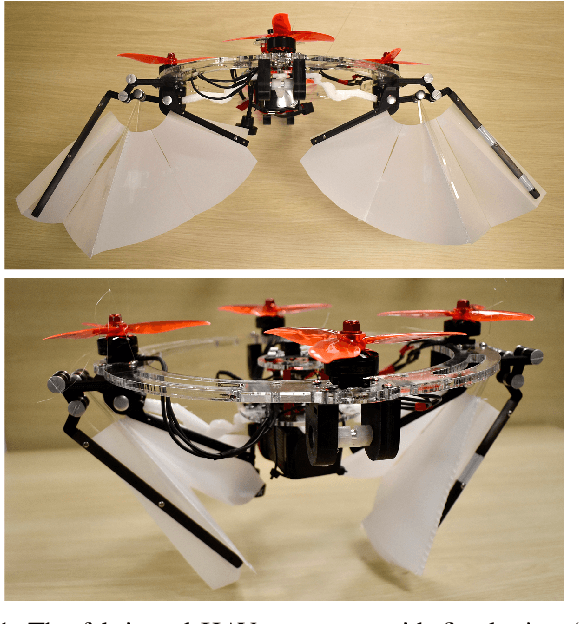
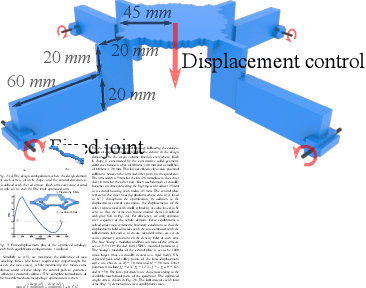
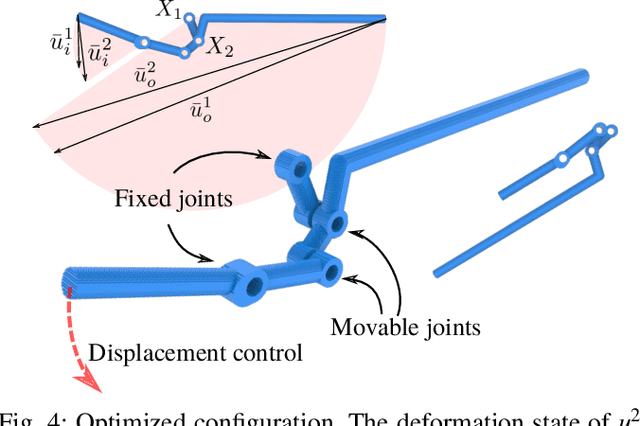
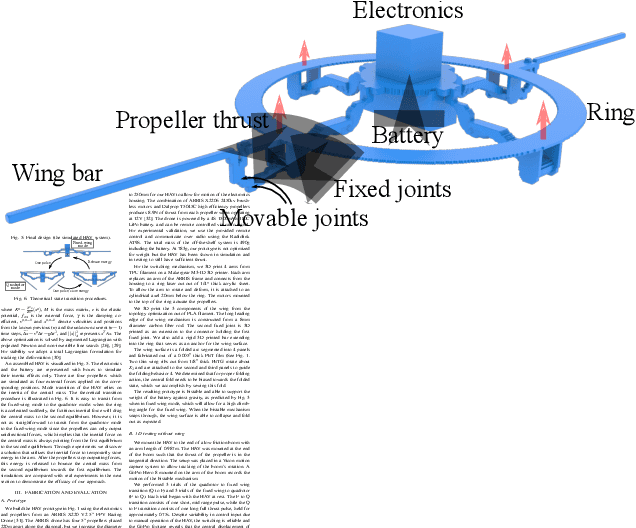
Unmanned aerial vehicles have been demonstrated successfully in a variety of tasks, including surveying and sampling tasks over large areas. These vehicles can take many forms. Quadrotors' agility and ability to hover makes them well suited for navigating potentially tight spaces, while fixed wing aircraft are capable of efficient flight over long distances. Hybrid aerial vehicles (HAVs) attempt to achieve both of these benefits by exhibiting multiple modes; however, morphing HAVs typically require extra actuators which add mass, reducing both agility and efficiency. We propose a morphing HAV with folding wings that exhibits both a quadrotor and a fixed wing mode without requiring any extra actuation. This is achieved by leveraging the motion of a bistable mechanism at the center of the aircraft to drive folding of the wing using only the existing motors and the inertia of the system. We optimize both the bistable mechanism and the folding wing using a topology optimization approach. The resulting mechanisms were fabricated on a 3D printer and attached to an existing quadrotor frame. Our prototype successfully transitions between both modes and our experiments demonstrate that the behavior of the fabricated prototype is consistent with that of the simulation.