 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMLOD: Awareness of Extrinsic Perturbation in Multi-LiDAR 3D Object Detection for Autonomous Driving
Paper and Code
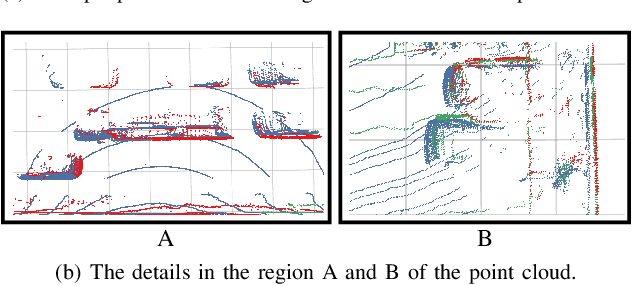
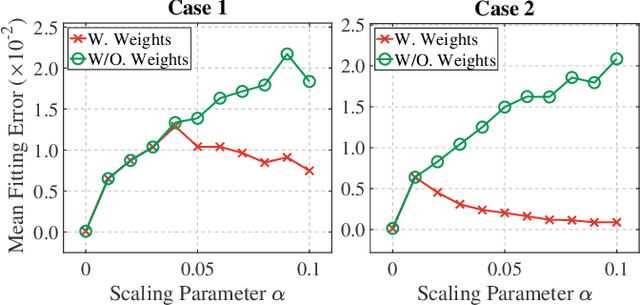
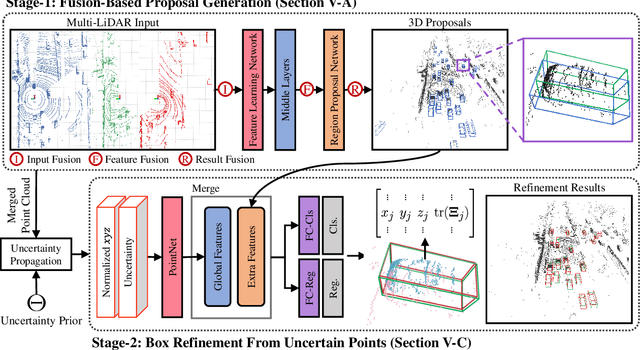
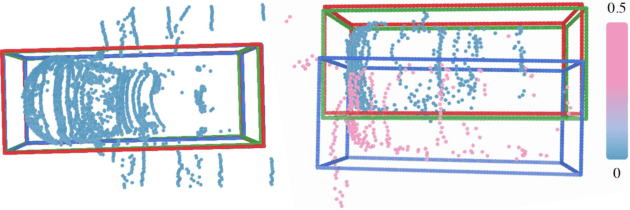
Extrinsic perturbation always exists in multiple sensors. In this paper, we focus on the extrinsic uncertainty in multi-LiDAR systems for 3D object detection. We first analyze the influence of extrinsic perturbation on geometric tasks with two basic examples. To minimize the detrimental effect of extrinsic perturbation, we propagate an uncertainty prior on each point of input point clouds, and use this information to boost an approach for 3D geometric tasks. Then we extend our findings to propose a multi-LiDAR 3D object detector called MLOD. MLOD is a two-stage network where the multi-LiDAR information is fused through various schemes in stage one, and the extrinsic perturbation is handled in stage two. We conduct extensive experiments on a real-world dataset, and demonstrate both the accuracy and robustness improvement of MLOD. The code, data and supplementary materials are available at: https://ram-lab.com/file/site/mlod