 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimum-Violation Planning for Autonomous Systems: Theoretical and Practical Considerations
Paper and Code
Sep 24, 2020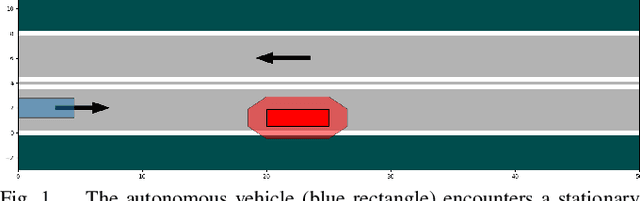
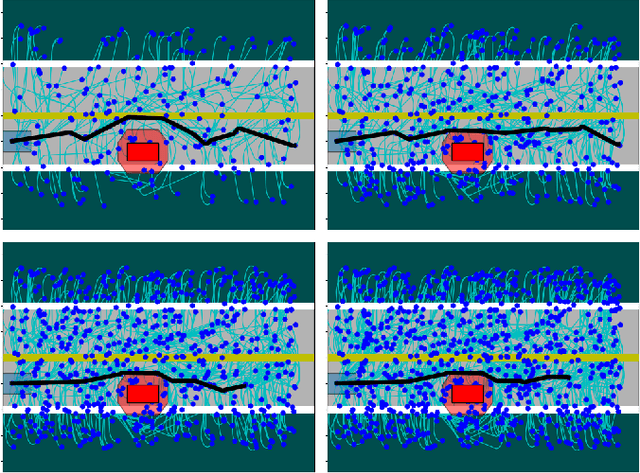
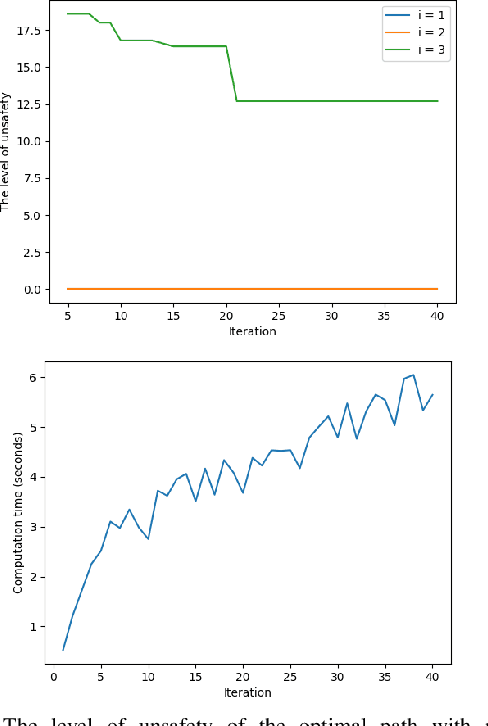
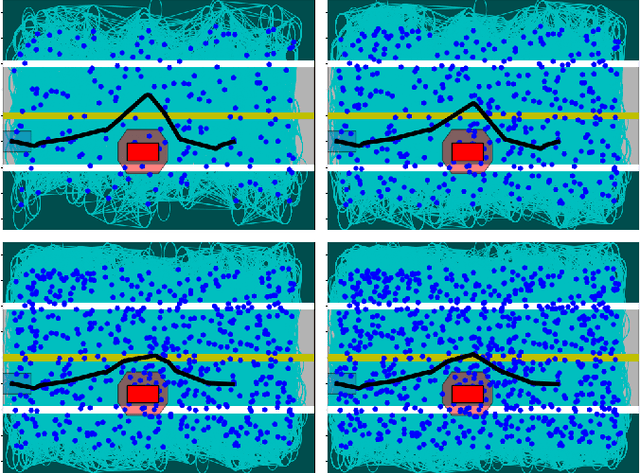
This paper considers the problem of computing an optimal trajectory for an autonomous system that is subject to a set of potentially conflicting rules. First, we introduce the concept of prioritized safety specifications, where each rule is expressed as a temporal logic formula with its associated weight and priority. The optimality is defined based on the violation of such prioritized safety specifications. We then introduce a class of temporal logic formulas called $\textrm{si-FLTL}_{\mathsf{G_X}}$ and develop an efficient, incremental sampling-based approach to solve this minimum-violation planning problem with guarantees on asymptotic optimality. We illustrate the application of the proposed approach in autonomous vehicles, showing that $\textrm{si-FLTL}_{\mathsf{G_X}}$ formulas are sufficiently expressive to describe many traffic rules. Finally, we discuss practical considerations and present simulation results for a vehicle overtaking scenario.